|
Thema:  ☀️Panzer Technik mal anders☀️ ☀️Panzer Technik mal anders☀️ |
[ - Antworten - ] |
01.08.2023, 15:08 Uhr
  Lukas_Haas Lukas_Haas
|
Mahlzeit Zusammen,
mein Name ist Haas Lukas, ich komme aus Oberösterreich und bin 25 Jahre alt.
In meiner Jugend habe ich in Verbindung mit meinem Vater laufend Modellbau betrieben, jedoch im Flugsektor. Da ich jedoch nach meiner Lehre als Mechatroniker im Sonder Maschinenbau Beruflich viel vereisen durfte, haben sich die Prioritäten ein wenig geändert.
Aktuell mache ich eine Berufliche Weiterbildung zum Mechatronik-Meister, und um diesen Titel gerecht zu werden, muss ich ein ausgearbeitetes Projekt vorweisen.
Somit Plane ich aktuell einen Photovoltaik Reinigungs-Roboter welcher ähnlich wie ein Panzer-Fahrwerk funktionieren sollte. Leider bin ich jedoch in dieser Art von Modellbau ein Neuling und hoffe somit, dass ich die Community einige Fragen stellen darf, und ich einige neue Ideen mitnehmen kann.
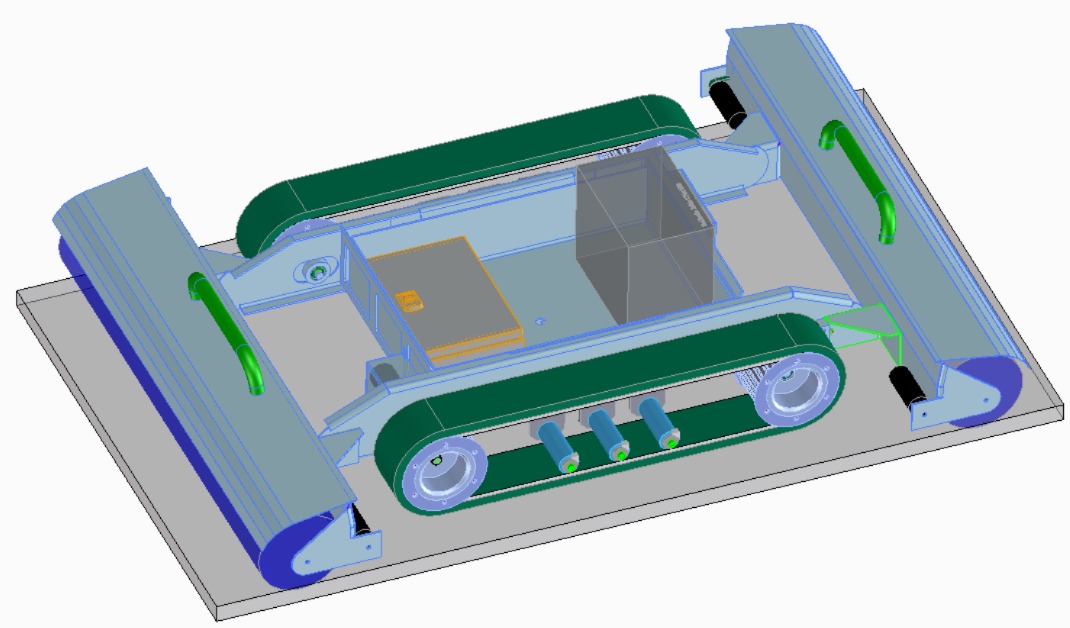
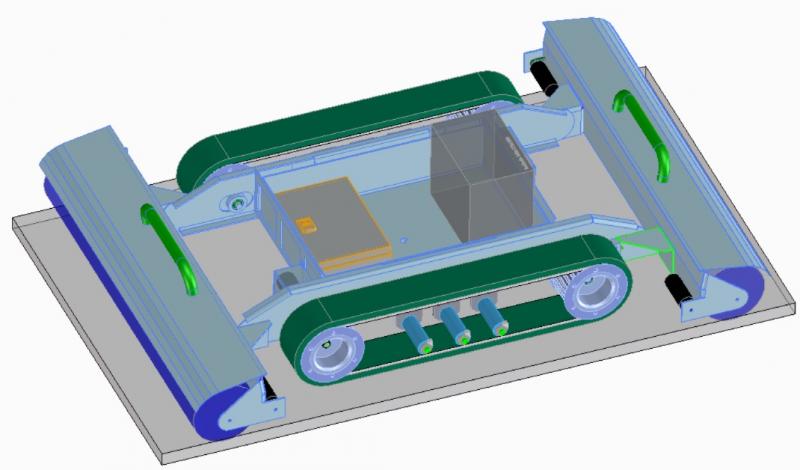
Im Anhang findet man ein Bild des ersten Entwurfs vom Reinigungsroboter.
Im Groben kann Mann sich das Fahrwerk vorstellen, wie ein Panzerfahrwerk jedoch mit beschichteten Zahnriemen, um Steigungen bis 25° bei Trockener und Nasser Oberfläche zu bewältigen.
Desweiteren wird vorne und hinten eine Bürste montiert, welche mit Kalkarmen (aufbereitetem) Wasser besprüht wird. Der Roboter wird Schlussendlich ca 80kg haben, und sollte eine Laufzeit von rund 80min ohne Batteriewechsel bewältigen können.
Das System sollte mit 24V funktionieren.
Meiner ersten Planung nach, werde ich Brushless Motoren für den Fahr und Bürstenantrieb Verwenden.
Beim Fahrantrieb habe ich den Joker 5060-9v3 geplant (pro Kettentrieb ein stk)
Beim Bürstenmotor plane ich den Joker 5050-11v3 (pro Bürstentrieb ein stk)
Die Beiden Motoren werden jeweils mit einem Planetengetriebe (100:1) übersetzt, die Endgeschwindigkeit wird schlussendlich mit einem Weiterem Getriebe nach den ersten Testˋs festgelegt. (da hier weitere Faktoren wie zum bsp die Größe der Riemenscheibe miteinspielen)
Als Steuerung habe ich bereits die RadioLink AT|| eingeplant.
Die oben genannten Komponenten habe ich bereits zuhause.
Nun zu meinen ersten Fragen.
-Welcher Motorregler, der Preislich im Rahmen liegt, wäre für diese Motoren angemessen? (Leider ist es gar nicht so einfach was passendes in dieser Größenordnung zu finden, die Faustformel mit 20% ist mir bekannt)
-Welchen Akku würdet ihr für so einen Zweck verwenden? Meinen Überlegungen nach würde ich gerne einen LiFePo4 Akku verwenden (24V 50AH) (da ich leider wenig Erfahrung in diesem Sektor habe, ist es für mich schwierig eine Passende Batterie für diesen Zweck zu berechnen, da die Motoren vermutlich nie bzw. nur kurz auf Höchstleistung laufen werden.)
-werden bei den Antrieben im Panzersektor eine Art Rutschkupplung verbaut, welche die Antriebsmotoren bzw. Komponenten vor Überlast schützen? Falls ja.. welche?
-wie funktioniert der Prozess mit einem V-Mischer (Kettenmischer)?
Sollte jemand eine andere Idee haben für die Antriebsmotoren, bzw. die Ansteuerung, wäre ich sehr Dankbar, wenn diese mit eingebracht wird.
Ich bedanke mich bereits jetzt für die Unterstützung, sollte der Thread unangemessen sein, bitte löschen.
Jedoch dachte ich mir, wo bin ich besser aufgehoben, als in einer Modellbau Gruppe für Großmodelle welche im Aufbau sehr ähnlich gestaltet sind.
Schöne Grüße aus Österreich☀️☀️
|
|
 |
|
|
01.08.2023, 16:07 Uhr
Robert
BW-Meister
[Administrator]

|
Hallo Lukas.
So ein ähnliches Konzept gibt es bereits für "swimming pool robot cleaner". Das könnte man sich erstmal anschauen um ein paar zusätzliche Ideen zu bekommen.
Entscheidend ist erstmal, auf was für Solarzellen du den Roboter einsetzen willst (größe der Fläche, Steilheit und Erreichbarkeit z.b. Dach), und ob dort eine Infrastruktur wie Wasserleitung und Stromanschluß verfügbar ist, oder ob es sich dabei um Photovoltaik-Anlagen handelt, die irgendwo auf dem freien Feld stehen. Soll der Roboter autonom fahren, oder während der ganzen Zeit von einem Operator ferngesteuert werden ?
Momentan bezweifele ich, ob du genügend Reinigungsflüssigkeit in den Roboter bekommst um damit größere Flächen zu reinigen. Wenn du die schmutzige Reinigungslösung nämlich zu lange auf der Fläche benutzt, zerkratzt du mit dem Schmutzanteil die Glasflächen der Solarzellen. Ich würde überlegen, ob auch eine Lösung mit einer Versorgungsleitung in Frage kommt, über die Strom, Wasser in den Roboter kommt und über die das Schmutzwasser über einen Nass-Sauger abgesaugt werden kann.
PS:
Wenn du Brushless-Motoren für dein Projekt verwendest, dann benötigst du auch zwingend Fahrtregler für Brushless-Motoren. Die Fahrtregler für normale Elektromotoren funktionieren nämlich nicht mit Brushless-Motoren.
Gruß Robert
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von Robert am 01.08.2023 16:09. |
|
|
01.08.2023, 17:17 Uhr
Lukas_Haas
|
Servus Robert,
erstmal vielen Dank für die Rasche Antwort.
Genau diese Art von Referenz Projekt ist mir bekannt, es gibt bereits auch Hersteller von diesen Photovoltaik Reinigungsrobotern, zum bsp Sun-X oder Solarcleano, meiner Recherche nach, verwenden diese für den Antriebsstrang Servomotoren, die Roboter sind aber dementsprechend Teuer (~25tsd €+).
Der Roboter sollte zugleich auf Dachflächen für Häuser, jedoch auch für Freiflächen auf Felder verwendet werden können, aus diesem Grund würde ich das ganze gerne mit einem Akku betreiben.
Für die Wasserzufuhr wird eine Art Schlauchroller am Dach angebracht (mittels Saugnopf) wo der Roboter den schlauch nachziehen kann.
Dieser Schlauch wird in weiterer Folge mit einem IBC Container und einer Pumpe verknüpft.
(sollte das funktionieren Plane ich ein altes Feuerwehr Auto zu kaufen, aber das ist aktuell noch zweitrangig)
Für die erste Generation des Roboters, sollte dieser vom Operator ferngesteuert werden.
(Da der Aufwand für autonomes Fahren zu groß wäre, mit Sensoren für die Absturzsicherung etc.)
Die Fläche wird von oben nach unten gereinigt, sprich das Schmutzwasser läuft immer ab, und wird nicht abgesaugt.
Für die Reinigungsbürsten bin ich bereits in Kontakt mit div Hersteller, um die Flächen schonend zu reinigen.
Für die Fahrtregler Plane ich natürlich auch welche die mit Brushless Motoren betrieben werden können.
Nur meine Frage zu den Fahrtregler wäre, welche Hersteller in diesem Bereich von Modellbau verwendet werden, um bei der Inbetriebnahme keine Schwierigkeiten zu haben.
Aktuell Plane ich den folgenden Regler für den Fahrantrieb:
https://shop.robitronic.com/de/hobbywing-ezrun-max6-hw30105000
Jedoch ist dieser meines Erachtens überdimensioniert, und leider finde ich keinen Optionalen Passenden Regler somit hoffe ich auf einen *Insidertipp*.
Für den Bürstenantrieb Plane ich einen Regler aus dem Flug - Sektor, da dieser nur in eine Richtung drehen muss.
|
|
| |
|
|
02.08.2023, 13:55 Uhr
Robert
BW-Meister
[Administrator]
|
Hallo Lukas.
Der Fahrtregler den du genannt hast ist schon recht teuer. Da gibt es günstigere Varianten.
Z.B. bei Conrad -> https://www.conrad.de/de/search.html?search=fahrtregler%20brushless&searchBarInput=fahrtregler
Bei den Brushless-Fahrtreglern muß man aber aufpassen. Da gibt es unterschiedliche Varianten für Flugzeuge, Glattbahn-Renner, Hüpfe-Autos und Trucks bzw. Rockcrawler.
Die Flugzeug-Varianten laufen nur in eine Richtung und sind teilweise mit einem Einschaltschutz versehen. Um diese Brushless-Fahrtregler zu aktivieren, muß man nach dem Einschalten noch einige besondere Bewegungen mit dem Steuerknüppel an der Fernbedienung machen, damit die dann irgendwann loslaufen. Sowas ist natürlich blöde, wenn man das für jeden Motor einzeln machen müßte.
Die Varianten für schnelle Glattbahn-Renner und Gelände-Hüpfer sind bei niedrigen Geschwindigkeiten nicht sehr feinfühlig und haben teilweise unterschiedliche Kennlinien für vorwärts und rückwärts fahren. Sie sind mit einer besonderen Bremsfunktion ausgestattet, wo beim Zurückziehen des Steuerknüppels zuerst die Bremsfunktion aktiviert wird. Dann muß man den Steuernüppel wieder zurück in die Neutralposition stellen, erst dann läßt sich der Fahrtregler in den Rückwärtsgang schalten. Das ist natürlich extrem blöde, wenn man versucht mit solchen Fahrtreglern und einem Kreuzmischer ein Kettenfahrzeug zu steuern.
Am besten sind Fahrtregler geeignet, die ein Programm für Truckmodelle oder Rockcrawler haben. Diese steuern sehr feinfühlig auch bei niedrigen Geschwindigkeiten und haben eine elektrische Motorbremse die entweder bei Neutralstellung oder (noch besser) sogar dynamisch bei Langsamfahrt den Motor elektrisch abbremst. Wenn bei Kettenfahrzeugen die Kurveninnere Kette nicht aktiv abgebremst wird, dann tendiert ein Kettenfarzeug nämlich dazu geradeaus zu fahren, was das Lenken dann ziemlich schwierig macht.
Am besten ist es sich vor dem Kauf immer die Bedienungsanleitung des Fahrtreglers zu besorgen (gibts meißtens Online in den Shops) und diese sehr genau zu studieren ob deren Funktionen für deinen Anwendungsfall passend sind.
PS:
Rutschkupplungen werden im Panzerbau garnicht verwendet.
(Es gibt allerdings auch Lenkungen, bei denen das Kettenfahrzeug über Kupplungen und Bremsen gesteuert wird.)
PPS:
Kreuzmischer sind ein Programm in der Fernsteuerung oder eine Elektronik zwischen Empfänger und Fahrtregler, die zwei Kanäle einer Fernsteuerung miteinander Mischen. Durch die Mischung werden bei der Bewegung des ersten Steuerknüppels beide Fahrtregler gleichzeitig in die gleiche Richtung angesteuert. Bei der Bewegung des zweiten Steuerknüppels werden beide Fahrtregler jeweils in die entgegengesetzte Richtung angesteuert. Dies geschieht für beide Steuerknüppel dynamisch überlagernd. Dadurch läßt sich ein Kettenmodell mit einem Steuerknüppel lenken, und mit dem anderen Steuerknüppel vorwärts oder rückwärts fahren.
Der Grund warum viele Modellbauer eine Elektronik verwenden liegt darin begründet, dass die Kreuzmischer-Programme in der Fernsteuerungen nur schwierig zu Programmieren, oder bei billigen Fernsteuerungen erst garnicht vorhanden sind.
Gruß Robert
|
|
| Beitrag 3 mal editiert. Zuletzt editiert von Robert am 02.08.2023 18:50. |
|
|
02.08.2023, 14:21 Uhr
Robert
BW-Meister
[Administrator]
|
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von Robert am 02.08.2023 14:21. |
|
|
02.08.2023, 20:53 Uhr
Lukas_Haas
|
Servus Robert.
Vielen Dank für deine Hilfreiche Auskunft.
Mir war leider nur bewusst, dass es unterschiedliche Regler für den Flug und Fahrzeug Bau gibt, jedoch nicht, dass sich diese auch wieder unterscheiden.
Welchen Regler könntest du mir für meine Funktion empfehlen?
Leider ist dies als Neuling echt eine schwierige Aufgabe etwas passendes zu finden, mit der Menge an Angebot.
Die Problemstellung liegt leider darin, dass ich einen 6-8S Regler benötige (24V Betriebsspannung).
Die meisten Regler ‚können‘ nur 2-3S.
Bezüglich der Ansteuerung wäre es also Sinnvoll einen Kettenmischer wie folgt zu Verbauen?
https://www.modellbau-regler.de/shop/product_info.php?products_id=124
Vielen Dank, und schöne Grüße
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von Robert am 02.08.2023 22:16. |
|
|
02.08.2023, 23:06 Uhr
Oldchap

|
Hallo Lukas,
meine Panzerchen in 1:6 wiegen so zwischen 120 und 160 kg, sind also eine Nummer größer als Dein geplantes Fahrzeug. Sie müssen als Panzer nicht nur auf glatten Flächen fahren, sondern auch mit Steigungen in hohem Gras etc. zurechtkommen. Deshalb kann ich sagen, dass Dauerleistungen von 350 bis 500 W je Motor (bei 24 V, also 8S LiFePo4) absolut ausreichen; auch bei den PV-üblichen Steigungen. Eine EMK-Bremse im Regler halte ich für zwingend notwendig, damit man nicht dauernd mit dem Gas spielen muss, um das Gerät langsam bergab rollen zu lassen.
Von Brushless-Motoren halte ich in diesem Bereich wenig, denn zumindest die typischen Vertreter aus dem Modellbau sind nur für Kurzläufe von max. 10 min konzipiert, nicht für Dauerbetrieb. In der Großmodellszene verwenden wir daher nach wie vor Bürstenmotoren aus dem Profibereich (Kinderautos etc.). Die sind dauerlauffest und es gibt spezielle Panzerregler dafür, die auch den Kreuzmischer und eine einstellbare EMK-Bremse beinhalten und die ebenfalls dauerlauffest sind.
Ich empfehle bis max. 140 kg 2 Motoren Unite 350 W MY1016Z3 mit Stirnradgetriebe, denn die bringen gleich die richtige Drehzahl mit und haben praktischerweise ein Abtriebs-Kettenrad für eine Industrie-Rollenkette. Als Regler wäre der TVC-B100 von SGS zu empfehlen (bis 36 V, 2 x 100 A Dauerlast). Was manche nicht wissen: die Lastfestigkeitsangabe von Reglern bezieht sich i.d.R auf Vollaussteuerung ("Vollgas"). Wer langsam fahren will / muss, sollte wissen, dass sich die Maximallast prozentual in etwa mit der Durchsteuerung reduziert. Will sagen, ein 100 A - Regler verträgt bei Halbgas nur etwas mehr als ca. 50 A usw.
--
Viele Grüße
Gerhard
_________________________
Bigtanks-Köti 1:6, Hermann-Porsche-Köti 1:6, Bigtanks-Jati 1:6, Armortek-Japa 1:6, Spearhead Pz. IV 1:6
|
|
| |
|
|
03.08.2023, 09:10 Uhr
Lukas_Haas
|
Hallo Gerhard,
aktuell habe ich mich bewusst gegen Brushed Motoren entschieden, mit dem Hintergedanken, dass der Motor spätestens alle 30-40h defekt ist, sprich alle 3-4 Wochen, wenn man den Roboter aktiv nutzt.
Leider habe ich aber keine Erfahrung mit den Dauerläufern, mit welchem Wartungsintervall ist bei den von dir genannten Motoren zu Rechnen, bzw welche Erfahrungen hast du mit diesen Motoren gemacht?
Sind diese Wartungsfreundlich gebaut? (Bürsten leicht zugänglich?)
Vielen Dank, und freundliche Grüße
Lukas
|
|
| |
|
|
03.08.2023, 09:58 Uhr
Oldchap
|
Hallo Lukas,
die Motoren sind zwar haltbar, aber nicht wirklich wartungsfreundlich aufgebaut. Ihre 4 Kohlebürsten sind von außen nicht zugänglich, weil das Gehäuse komplett dicht ist. Natürlich kann man es zerlegen und die Bürsten auswechseln, aber der Zusammenbau ist etwas tricky, weil die 4 Bürsten in ihren Gehäusen gehalten werden müssen, bis der Anker eingeschoben ist. Das wiederum geht eigentlich nur, wenn der Anker außerhalb des Gehäuses in den hinteren Deckel geschoben wird und diese Einheit dann im Stück ins Magnetgehäuse geschoben wird. Dabei ziehen die Magneten den Anker an und der will wieder aus dem hinteren Deckel rausschnappen, wenn man nicht aufpasst. Mit etwas Übung hat man den Bogen dann aber schnell raus.
Positiv ist, dass ich in 13 Jahren Panzerei nicht einmal den Fall hatte, dass die Bürsten ausgewechselt werden mussten. Mein Öffnen des Motors war reine Neugier, denn ich wollte wissen, ob dort Entstörkondensatoren eingebaut sind (es sind keine drin; das stört aber trotzdem nicht). Ich kenne auch bei viel älteren Panzern als meine keinen Fall, bei dem die Bürsten hätten gewechselt werden müssen.
Wichtiges Kriterium dabei ist natürlich die Laufzeit und nicht das Alter. Ich kenne einen Kollegen, der seine Ketten komplett abgefahren hat, was nach Aussage der Herstellers frühestens nach 200 Laufstunden der Fall sein sollte. Auch nach dem Wechsel der Kette auf eine "unkaputtbare" Stahlkette fuhr der Kollege bis heute schon wieder ein paar Jahre, immer noch ohne Motorprobleme. Ich halte diese Motoren also für recht langlebig. Auch die 4-fache Kugellagerung (Motor + Getriebe) und die dicken gehärteten und schrägverzahnten Stahlzahnräder machen einen recht vertrauenerweckenden Eindruck. Nachteilig sind Größe und Gewicht. Vergleichbare "Spielzeug"-BL-Motoren sind weniger als viertel so groß und um Faktoren leichter.
Hier mal ein zerlegter Motor, den ein Kollege durch Blockieren verbrannt hat. Das ist übrigens der einzige mir bekannte Fall dieser Art.
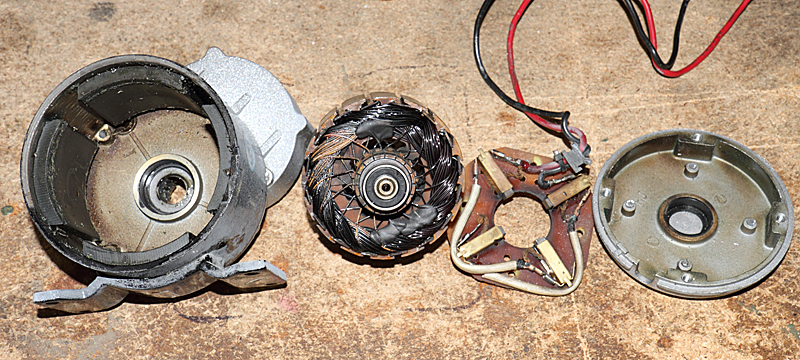
Und hier, sozusagen zur Abschreckung, ein Größenvergleich zwischen einem (allerdings 500 W starken) Unitemotor und einem gleichstarken Motor aus der Modellfliegerei; auch der noch in Bürstenausführung. Beide haben ein Planetengetriebe. Welcher Motor wird wohl länger halten?

--
Viele Grüße
Gerhard
_________________________
Bigtanks-Köti 1:6, Hermann-Porsche-Köti 1:6, Bigtanks-Jati 1:6, Armortek-Japa 1:6, Spearhead Pz. IV 1:6
|
|
| |
|
|
04.08.2023, 12:13 Uhr
Lukas_Haas
|
Hallo Gerhard,
vielen Dank für die Ausführliche Beschreibung und die Einblicke in den Brushed Motor.
Dies hat jetzt meine Ansicht um vielfaches verändert, und ich werde die Antriebstechnik nochmals überdenken.
Welche Akku‘s verwendet ihr bei euren Panzern (LiFePo4 24V 20AH?) bzw. welche Batterie - Laufzeit strebt ihr dabei an?
Vielen Dank, und schöne Grüße
Lukas
|
|
| |
|
|
04.08.2023, 13:13 Uhr
Robert
BW-Meister
[Administrator]
|
Hallo Lukas.
Erstmal eine Anmerkungen zu unserm Hobby "Panzermodellbau".
Ziel unseres Hobbys ist es ein Modell zu bauen, das Maßstabsgerecht nicht nur so aussieht wie ein echter Panzer, sondern sich als Modell auch genau so bewegt wie das Original. Das bedeutet "langsam anzufahren", "viel Drehmoment zu haben" und "wie das Original zu Lenken".
1.)
Brushless Motoren sind eine Variante des Synchronmotors. Das bedeutet, dass von einer äußeren Elektronik ein Drehfeld im Motor erzeugt wird, dem der Rotor folgt. Gerade beim Einschalten eines Synchronmotors ist der Winkel zwischen Drehfeld und Rotor NICHT definiert, weshalb der Rotor eines Synchronmotors sogar zuerst einen Bruchteil einer Motorumdrehung rückwärts laufen kann, ehe er sich mit dem Drehfeld synchronisiert hat und dann wieder vorwärts läuft. Dies führt zu einem Ruck beim Anfahren, was bei uns Panzer-Modellbauern unerwünscht ist und außerdem das Getriebe zusätzlich belastet. Außerdem haben Brushlessmotoren weniger Drehmoment und höhere Drehzahlen als als Bürstenmotoren, weshalb die Getriebe aufwendiger werden.
Daher werden Brushless-Motoren im Panzermodellbau nur sehr selten verwendet.
Die Bürstenmotoren laufen da wesentlich sanfter an und sind daher besser zum Fahren geeigent.
Aus diesem Grund gibt es auch so gut wie KEINE Brushless-Fahrregler die für unsere Anwendungsfälle geeigent wären, und schon mal garnicht in der 24V-Klasse. Dafür ist der Markt einfach viel zu klein.
2.)
Es gibt unterschiedliche Varianten wie ein Kettenfahrzeug gelenkt werden kann. Die einfachste Methode ist über ein Differential beide Ketten gleichzeitig anzutreiben und zum Lenken die jeweils kurveninnere Kette mit einer Lenkbremse abzubremsen.
Eine andere Variante ist es mit einem Überlagerungs-Lenkgetriebe die Ketten anzutreiben und zu lenken. Beide Methoden führen zu unterschiedlichem Lenk und Fahrverhalten.
Die Anbieter von Kreuzmischern haben sich darauf eingestellt und bieten deshalb Kreuzmischer an, die das jeweilige Lenkverhalten im Modell simulieren.
Daher gibt es 3 Arten von Kreuzmischern auf dem Markt:
- normale Kreuzmischer (z.B. für Flugzeugmodelle mit V-Leitwerk)
- Kreuzmischer für Kettenfahrzeuge die Lenkbremsen simulieren
- Kreuzmischer für Kettenfahrzeuge die Überlagerungs-Lenkgetriebe simulieren
Der von dir ausgesuchte Kreuzmischer scheint Lenkbremsen zu simulieren. Das schränkt die Beweglichkeit deines Projektes etwas ein. Am besten für deinen Anwendungsfall ist ein "normaler Kreuzmischer".
3.)
Die Laufzeit ist bei uns Panzermodellbauern nicht so wichtig. Es reichen Fahrzeiten von ca. 20-30 Minuten, da nach dieser Zeit sowieso der Spaßfaktor nachläßt und das Fahren dann eher zu einer anstrengenden Qual wird. Da sind dann eher die schelle Tauschbarkeit des Akkus und die jeweiligen Ladezeiten der Akkus wichtiger.
Als Batterien wird alles gefahren was für das Buget bezahlbar ist und in das Modell passt (Blei, NiMh, LiPo, LiFePo).
Wobei LiPo's von einigen Modellbauern als Kritisch angesehen werden, da sie in Brand geraten können. Und bei einem Modell für 5.000,- bis 10.000,- Euro möchte man nicht sehen, daß es wegen einem dummen Akku abbrennt.
Gruß Robert
|
|
| Beitrag 10 mal editiert. Zuletzt editiert von Robert am 04.08.2023 13:46. |
|
|
04.08.2023, 23:30 Uhr
Oldchap
|
Hallo zusammen,
ich kann Roberts Aussagen zum Thema "Brushless für Panzer" nur zustimmen, möchte aber mal schmunzelnd anmerken, dass ich mit dieser Ansicht im Forum der 1:16-Modelle beinahe einen Shitstorm geerntet hätte  . Dort gibt es heftige Befürworter der BL-Motoren, die alles andere nur noch als antiquiert bezeichnen; die Büstenmotoren UND auch gleich deren Verfechter! . Dort gibt es heftige Befürworter der BL-Motoren, die alles andere nur noch als antiquiert bezeichnen; die Büstenmotoren UND auch gleich deren Verfechter!  Da haben dann die BL-Motoren VIEL mehr Drehmoment, können praktisch nie falsch herum anlaufen und sind sowieso viel brauchbarer als Bürstenmotoren.... Da haben dann die BL-Motoren VIEL mehr Drehmoment, können praktisch nie falsch herum anlaufen und sind sowieso viel brauchbarer als Bürstenmotoren.... 
Ais meiner Sicht liegt die Wahrheit bei der Größe; nicht bei der der Motoren, sondern bei der der Modelle. Für ein 80 kg Modell braucht man nun mal deutlich mehr Drehmoment als bei 8 kg und weniger. Aber ja, vielpolige BL-Außenläufer etwa für große Flugmodelle haben schon ordentlich Drehmoment und laufen auch langsamer. Was ihnen allen aber fehlt, ist ein hohes Drehmoment beim Anlaufen. Genau das ist aber wichtig für den Panzer! Das muss auch der Regler abkönnen, und das gleich in zweierlei Hinsicht: er muss den super-feinfühligen Anlauf unter Last nicht nur KÖNNEN, er muss ihn auch AUSHALTEN! Das ist nicht so einfach wie man zunächst glauben könnte, und wir verwenden deshalb nicht ohne Grund Regler mit 100 A Dauerlast pro Motor, obwohl der Motor nur 17 A Nennstrom hat! Wenn man mal gemerkt hat, wie heiß so ein vermeintlich viel zu kräftiger Regler bei langer Schleichfahrt unter Last wirklich wird, isr man dankbar für die Entscheidung.
Zum Akku und dessen Laufzeit: hier unterscheide ich mich deutlich von Roberts Meinung. Ein Ganztags-Panzertreffen bringt oftmals schon ein paar Stunden Einsatzdauer mit sich, und die muss bei mir der (LiFePO4-) Akku einfach durchstehen! Nachladen in der Pause geht nicht überall, saugt die Autobatterie leer und steht bei mir sowieso nicht gerade hoch im Kurs, und ein Wechsel des Akkus würde nicht ohne heftige Bastelei inkl. Zerlegen des Panzers möglich sein! Zudem ist es auch eine Geldfrage, eben mal einen zweiten 500 € - Akku im Vorrat zu haben.
Hier sieht man die vorderen 4 von insgesamt 8 LiFe-Zellen (40 Ah) und kann ahnen, welchen Zerlege-Aufwand ein Wechsel machen würde.

Das ist der Akku während des Zusammenschaltens in halb fertigem Zustand. Jede Zelle hat die Grüße eines ordentlichen Taschenbuchs mit 400 Seiten:

--
Viele Grüße
Gerhard
_________________________
Bigtanks-Köti 1:6, Hermann-Porsche-Köti 1:6, Bigtanks-Jati 1:6, Armortek-Japa 1:6, Spearhead Pz. IV 1:6
|
|
| |
|
|
13.08.2023, 13:19 Uhr
Lukas_Haas
|
Hallo zusammen,
vielen vielen Dank für die ausführliche Beschreibung und die tollen Einblicke.
Nach langem überlegen habe ich mich nun bei der Antriebstechnik für die Empfohlenen Brushed Motoren und den Fahrtenregler entschieden.
Die Komponenten liegen bereites bei mir auf der Werkbank, und ich werde im laufe dieser Woche die ersten Test‘s durchführen.
Für den Bürstentrieb werde ich bei den Brushless Motoren mit Übersetzung mittels Planetengetriebe bleiben.
Hierbei geht es rein um die Bauform, und da dieser Motor bei weitem nicht so stark belastet wird, sollte dies kein Problem darstellen.
Verwendet wird in meinem Fall ein 24V LiFePo4 Akku.
Vielen Dank fürs erste für die Mithilfe, wenn die ersten Bauteile gefertigt wurden, werde ich euch Berichten und einige Fotos hochladen.
Danke
Mit freundlichen Grüßen
Lukas
|
|
| |
|
|