|
Thema:  5-Achser Autokran FAUN ATF 120-5 im Maßstab 1:16 5-Achser Autokran FAUN ATF 120-5 im Maßstab 1:16 |
[ - Antworten - ] |
05.11.2014, 10:31 Uhr
  SLT50-2 SLT50-2
Der Dachsmaster

|
Hi Markus,
das nenn ich mal ein ambitioniertes Projekt , ich hab mir mal Bilder von dem Monstrum angesehen und bin erschrocken.
Ich hätte nichtmal den Platz um so einen Riesen zu bauen.
Ich drück Dir ale Daumen und wünsch Dir und uns schonmal viel Spass beim Bauen und Lesen.
Gruß
Michael
--
nicht´s ist unmöglich,wenn man es nur will
|
|

|
|
|
05.11.2014, 12:40 Uhr
MeierMarkus1985
|
Hey.
Ich hab zum Glück ne große Garage 
In 1/50 is er ja schon riesig, wenn man die Große Luffingspitze montiert.
Ich häng mal paar Bilder vom 1/50er rein, damit man ne Vorstellung bekommt

|
|
|
|
|
|
05.11.2014, 16:14 Uhr
scenic99
Bob der Baumeister

|
Hi Markus,
warum machst du nicht jetzt schon mal einen eigenen Thread auf, dann brauchen wir hier dem Micheal seinen Baubericht nicht unnötig zu belasten.
Sag mal, wenn du jetzt schon bis hinter die 5. Achse gekommen bist ... was hat er denn bis jetzt für Maße in 1:16 ???
Gruß
Dirk
--
email@dirkkristen.de
http://www.dirkkristen.de
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von scenic99 am 05.11.2014 16:48.
|
|
|
05.11.2014, 16:42 Uhr
MeierMarkus1985
|
Wird das jetzt auch tun.
Bis hinter der 5. Achse, wo die Drehkranzaufnahme anfängt, bin ich jetzt bei knapp 60 cm
|
|
|
|
|
|
05.11.2014, 16:49 Uhr
scenic99
Bob der Baumeister
|
... ja mach das mal - und als erstes stellst du ein Bild vom Original ein damit man mal sieht was das für ein Brummer wird !!!
Gruß
Dirk
--
email@dirkkristen.de
http://www.dirkkristen.de
|
|
|
|
|
|
05.11.2014, 17:02 Uhr
MeierMarkus1985
|
Thema von mir is jetzt unter
Bauprojekt LIEBHERR LTM 11200 9.1 in Maßstab 1:16
zu finden
|
|
|
|
|
|
01.04.2019, 15:22 Uhr
SLT50-2
Der Dachsmaster
|
Hallo Leute ,
nach ca. 7 Jahren gibt es nun Video vom Faun ATF 120-5 beim Aufbau mit Kontergewichten mit all seinen Funktionen .
Die beiden schwierigsten Sachen waren * das Ausfahren der seitlichen Stützen ( hier gab es immer wieder Probleme mit der Kabelführung zu den Motoren für die Stützfüsse ) und die Aufnahme des Kontergewichtes weil man hier *blind * in der richtigen Position mit den Aufnahmezylindern eintauchen muss um dann in der unteren Stellung zu verriegeln und das Gewicht sicher am Oberwagen anzuhängen.
Zuerst die Behebung des Problem`s mit der Kabelführung an den seitlichen Stützarmen:
Hier wurden die Kabel parallel zum Seilzug , der den 2. Auschub mit bewegt, gelegt und Getriebemororen mit einer Drehzahl von 200 1/Min
in Verbindung mit Gewindespindeln M6 und entsprechenden Muttern verbaut. Die Endstellungen sind durch Freiläufe mit Druckfedern gesichert.
Es hat einige Zeit gebraucht , bis diese Funktion nun endlich geklappt hat weil ich bei vorhergehenden Versuchen das Problem hatte , dass beim Einziehen der Stützarme der Fahrregler ( nicht nur einer sondern mehrere Marken und Ausführungen ) die Mittelstellung verloren hat und die Motoren dann gemacht haben , was sie wollten .
Einschlägige Meinnung war die , dass ich ein Problem in meiner Elktronik habe und diese komplett neu machen muss , deshalb hat der Kran dann auch 2 Jahre auf dem Regal verbracht weil hierzu absolut keine Lust hatte.
Wie es nun der Zufall wollte , brauchte ich zwischendurch einen kleinen Getriebemotor , wie er im Faun verbaut war , für meine Long Tom und weil ja der Kran sowieso nur rumgestanden hat , habe ich einfach den benötigten Motor ausgebaut und in meine Long Tom eingebaut ( ich sage gleich : Es waren die teuren Motoren von einem sehr großen Elektronik-Versand für 21 Euro pro Stk.) warum sage ich das ? Weil genau dieser Moror in meiner Long Tom genau das Gleiche gemacht hat ohne die geringste Beanspruchung ( nur im Leerlauf ) und somit war klar wo mein Problem lag und ich konnte es angehen.
Nun funktioniert das wie es soll.
Nun die Kontergwichtsaufnahme :
Hier wurden 2 Brushlessmotoren Graupner Inlne 220 gemeinsam an einen Regler angeschlossen und über Zahnräder werden jeweils eine Kugelgelagerte Mutter M4 angetrieben ,welche die beiden Spindeln M4 nach oben und unten bewegen . die Endabschltung funktioniert mit den bekannten CTI Endschaltermodulen welche nur im Servokabel mit eingesteckt werden und nun beide Endlagen über einen Kontakt mit Minus geschaltet werden .
Das Minus liegt konstant am Metallträger für die Aufnahme an und die beiden zu schliessenden Kontakte sind ertsens als isolierte Kontaktstelle an der untersten Spindelposition und als ebenfalls isolierte Kontakstelle in Form eines Neusilberbleches an der Unterseite des Träger`s angebracht .
Die nächste Schwierigkeit war die absolut sichere Positionierung des Kontergewichtes auf dem Unterwagen , was ich mit Hilfe von Messbolzen und Indexen bewerkstelligen und sicherstellen konnte.
Das Gewicht des Kontergewichtes beträgt ca. 9 Kg
Das Ergabnis seht Ihr in dem Video
https://www.youtube.com/watch?v=dKG9q_ovTO0
Der Kran kann nun endlich komplett fertiggstellt und in Dienst gestellt werden.
Grüße
Michael
--
nicht´s ist unmöglich,wenn man es nur will
|
|
| Beitrag 2 mal editiert. Zuletzt editiert von Robert am 01.04.2019 15:35.
|
|
|
01.04.2019, 18:19 Uhr
SLT50-2
Der Dachsmaster
|
Hallo HaJo ,
ja, der Kran ist in Dortmund anwesend.
Ihr dürft dann ein paar Container zum Heben mitbringen .
Grüße
Michael
--
nicht´s ist unmöglich,wenn man es nur will
|
|
|
|
|
|
01.04.2019, 18:40 Uhr
Norbert
Puppenspieler
[Administrator]

|
Bekommst den überhaupt in Dein Auto   . .
Oder lässt Deinen Beifahrer zu Hause  . .
Schön, dass er endlich richtig läuft  
Gruß Norbert
--
http://www.panzerfan.de

Baukastenbauer 
|
|
|
|
|
|
02.04.2019, 15:18 Uhr
Rooki
|
Moin Moin ,
Boah ,Mega ,das ist der Hammer .
Glückwunsch Tolle Leistung .
Freu mich drauf den auf der Messe zu sehen .
Gruß George
--
Auch die Besten machen Fehler
Panzer Team Itzehoe
|
|
|
|
|
|
02.04.2019, 19:52 Uhr
Radfahrer

|
Hallo Fabelwesenzüchter,
Spitzenarbeit!
Das alles nicht nur funktionell, sondern auch ausreichend stabil zu fertigen ist ganz großes Kino.
--
Isch ´abe ga´ keine Fahrrad!
Olaf (der Radfahrer)
|
|
|
|
|
|
08.04.2019, 19:33 Uhr
EICHE

|
Hallo Michael,
Mega Technik, Die Du hier zeigst.
Hut ab !
--
Gruß Gerhard
|
|
|
|
|
|
08.04.2019, 20:30 Uhr
Norbert
Puppenspieler
[Administrator]
|
|
06.06.2021, 15:11 Uhr
SLT50-2
Der Dachsmaster
|
Hallo zusammen ,
nun im 12 Jahr gibt es mal wieder ein Update vom Kran , um genauer zu sein : von der Lenkung der Achsen.
Der Ein oder Andere wird es bei Vorführungen und auf Videos vom Fahren schon bemerkt haben , dass die Achsen aufgrund der ganzen Umlenkungen und Hebel so viel Spiel haben , dass sie sich im Fahrbetrieb ( vor Allem im Gelände ) etwas selbsständig gemacht haben und vor Allem die mittlere Achse sich bei Widerstand am Reifen extrem zur Seite gedrückt hat .
Ich habe lange überlegt , wie ich die Achsen ohne Hebel und Umlenkungen direkt ansteuern kann und dieses Spiel nicht mehr existiert.
Normale Spindelantriebe sind zu langsam und so viel die Entscheidung zu Gunsten der CTI Zylinder TITAN 30 mit 6 Kg Stellkraft bei 12 Volt.
Um an die AFV Achsen diese Zylinder anbauen zu können musste ich zuerst einmal Halter aus 2mm Alu-Winkelprofil 30x30 mm machen ,an denen die Zylinder angebaut werden.
Hierzu wurden die Achsen zerlegt , das Bohrbild der Deckel auf das Alu übertragen und die Halter dann passend gefertigt und gebohrt . Im Bereich des Tellerrades wurde in die Halter eine Bohrung 24mm eingebracht , damit das Tellerrad nicht mit dem Aluhalter kollidiert.
An den Achsgehäusen wurden die Bohrungen für die Originalschrauben M1,6mm auf 2mm aufgebohrt um alles mit Niro-Schrauben M2 x40 verschrauben zu können .
Das nächste Problem waren nun die Achsausgänge weil hier ja 2mm Alu dazu kamen .
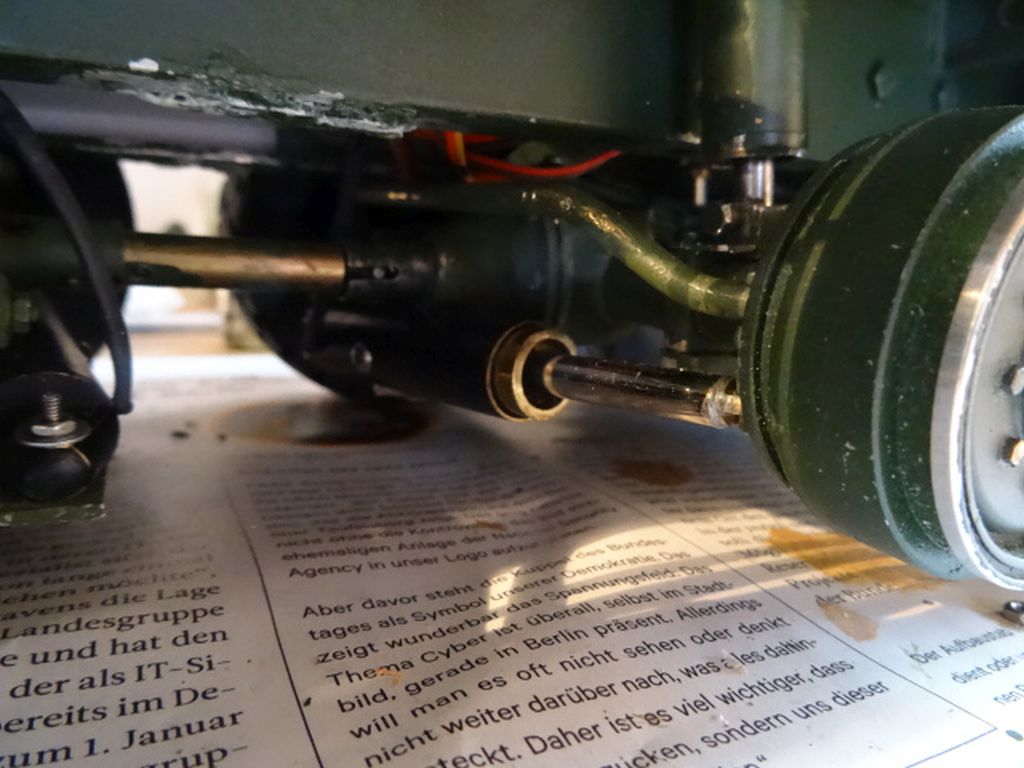
Hier habe ich hinter die Ausgangskegelräder Drucklager eingebaut um erstens die Längendifferenz für das Flankenspiel ausgleichen zu können und 2. die Ausgangswellen gegen Druck zu lagern.
zu guter Letzt musste ich noch einen Freiraum an den Achssausgängen schaffen damit ich die Zylinder mit 14mm überhaupt einbauen kann , ohne daß Sie mit den Achsen kollidieren, dies geschah mit Hilfe des Proxxon Feinbohrschleifers und einem 14mm Rundschleifer.
Anschließend wurde alles wieder zusammengeschraubt und sieht im eingebauten Zustand so aus

Die Ansteuerung der Zylinder wr nun die nächste Herausforderung , zumal ich zwischen normaler Kurvenfahrt und Krabbengang umschalten muss ( bei der ersten Version war dieses Problem mit Hilfe des mechanischen Mischers gelöst , in dem sich die beiden Servo´s für die 3 vorderen und die beiden hinteren Achsen befunden haben , im Normalbetrieb hat ein Servo mit unterschiedlichen Hebellängen die 3 vordern Achsen und der andere Servo die beiden hinteren Achsen gelenkt . Für den Krabbengang wurde der Schlitten mit den beiden Servos verschoben und alle Achsen hatten den gleichen Einschlag nach einer Seite ) .
So konnte ich das nun nicht mehr machen.
Nach vielen Überlegungen hin und her habe ich mich dazu entschlossen , die Zylinder mit Servo-Elktroniken von Servo´s mit 11kg Stellkraft anzusteuern und zwar jede Achse mit 2 Stück ( einmal für Kurvenfahrt und einmal für den Krabbengang)
In der einen Gruppe haben alle die gleiche Hebellänge für den Krabbengang und in der anderen Gruppe hat jede Achse eine andere Hebellänge für die normale Kurvenfahrt
Hierzu musste ich die Servo´s zerlegen , den Poti ablöten und mit Servokabel wieder mit der Platine verbinden.
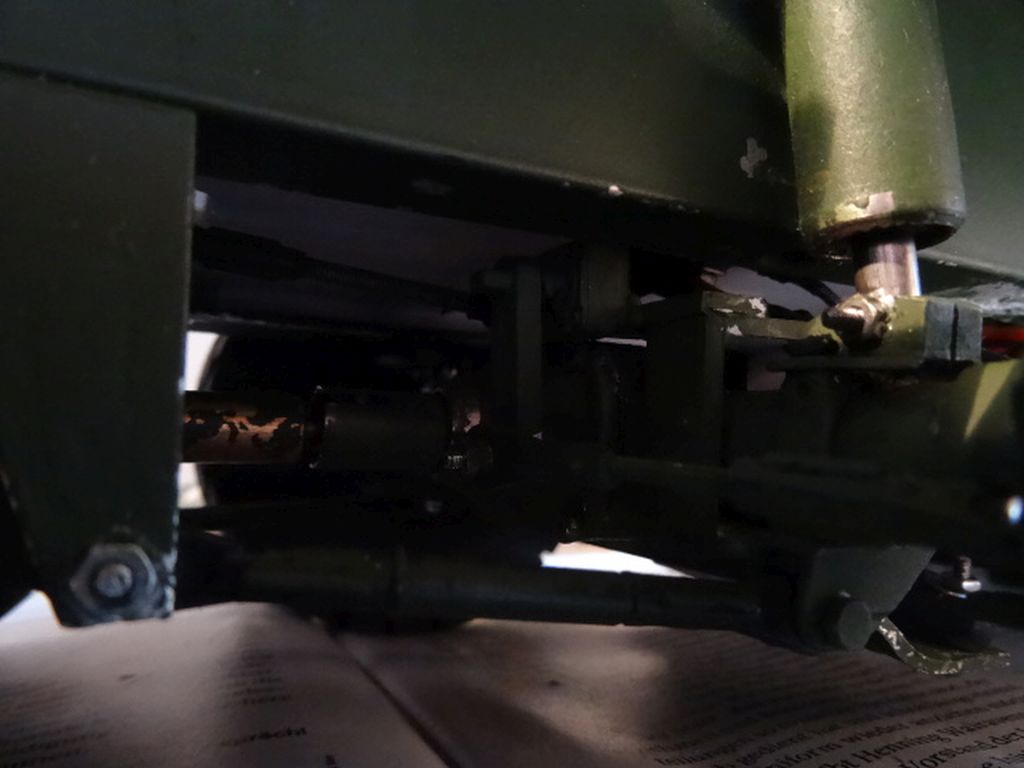
Anschließend musste der Poti an die Achse angebaut werden und ein Hebel darauf befestigt werden , der über eine * Spurstange* von der Achse angesteuert wird.
Die Hebellänge ist entscheidend für den Lenkeinschlag der Achse ,je länger der Hebel auf dem Poti , umso größer der Lenkeinschlag.
Hier ein Bild dazu , man kann das viereckige Kästchen mit Achse und dem Hebel darauf erkennen, das ist der Poti
Die Elektroniken der vorderen 3 Achsen und beiden hinteren Achsen sind jeweils mit dem Impuls zusammengeschaltet ,d.h. die hinteren Achsen werden über Kanal 1 zusammen gelenkt und die 3 vorderen Achsen werden über Kanal 4 zusammen gelenkt .
Um nun von der normalen Kurvenfahrt auf den Krabbengang zu schalten wird ein CTI Funktionswahlschalter über ein PS4U umgeschaltet auf dessen einer Ebene die Steuerungen für die Kurvenfahrt und auf der anderen Ebene die Steuerungen für den Krabbengang liegen. vor dem Umschalten muss ich allerdings die Elektroniken stromlos schalten weil es sich um digitale Elektroniken handelt und die haben immer irgendeinen Impuls im Speicher , was zum Weglaufen der Achsen führen kann ( dieses Problem hatte ich beim ersten Probelauf und konnte es mit Hilfe von Helmut Marschall / CTI sehr schnell lösen)
Außerdem werdet Ihr auf dem folgenden Video auch erkennen , dass die mittlere Achse weggeschaltet werden kann , was für die normale Fahrt bis 50 Km/h nötig ist und eine bessere Wendigkeit ergibt. bei Fahrten über 50 Km/h wird die 3 . Achse zugeschaltet und die beiden hinteren Achsen bleiben gerade .
Somit kann ich nun alle Lenkvorgänge des Originals einwandfrei und spielfrei steuern.Ganz nebenbei hat sich auch eine neue Beifahrerin beworben und wurde eingestellt

Hier nun 2 Videos von den ersten Fahrten, einmal drinnen und einmal draußen
https://www.youtube.com/watch?v=13IBpSAD_W0
https://www.youtube.com/watch?v=usQDaoHlwbE
viel Spaß beim Anschauen und bis zum nächsten Mal
Grüße
Michael
--
nicht´s ist unmöglich,wenn man es nur will
|
|
|
|
|
|

