|
Thema:  Getriebemotorumbau zum Servo? Getriebemotorumbau zum Servo? |
[ - Antworten - ] |
11.07.2011, 21:40 Uhr
  FURIANER FURIANER

|
Hi
Ich als alter Elektronikmuffel muss da was bei erfragen.
Ist es möglich einen RB35 Getriebemotor zu einem Servo umzubauen?
Wenn ja wie geht das bzw. was benötigt man dazu?
Der Getriebemotor/Servo soll meine Bordkanone ansteuern, die obendrein auch noch stabilisiert werden soll.
Und da die zu bewegende Masse der Waffe ja nicht wenig ist, dachte ich einen Getriebemotor umzubauen.
Wäre super wenn mir hier eine Hilfestellung gegeben wird.
Bin für jeden Tip dankbar.
Bitte nicht wundern wenn ich nicht gleich innerhalb der nächsten Tage auf eure Ratschläge antworte, komme nicht immer an den Rechner ( Kinder:D )
Gruss und Panzer Hurra
Björn
|
|
 |
|
|
11.07.2011, 22:21 Uhr
Doomgiver
|
Hallo,
doch, das geht. Benedini hat z.B. ein entsprechendes Modul im Angebot. Sonst frag mal Peter (mesosce). Ich glaube, der hat auch sowas in der Kiste.
Heiko
|
|
| |
|
|
12.07.2011, 01:42 Uhr
Oldchap

|
Ja, das geht. Ich habe z.B. eine rumliegende Elektronik aus einem ausgeschlachteten Servo an einen Getriebemotor angelötet. Allerdings brauchte ich die nur als Fahrtregler, deshalb habe ich das Poti in Mittelstellung unangesteuert gelassen. Beim "echten" Servobetrieb braucht man das Poti am Abtrieb des Motors (oder sonstwo, wo es mitgedreht wird), damit die Rückmeldung da ist. Auch der E-Versand mit dem großen "C" hatte zumindest früher lose Servo-Elektroniken.
Wichtig ist, darauf zu achten, daß der Strombedarf des Getriebemotors von den Endstufen der Elektronik aufgebracht werden kann. Viel mehr als 2 A sollten es daher bei normalen Endstufen nicht sein.
Die Stabilisierung kann übrigens elegant und einbaufertig mit einem Heading-lock-Kreisel aus der Modellhelifliegerei erledigt werden, nur ist dazu ein relativ schnelles "Servo" nötig.
--
Viele Grüße
Gerhard
|
|
| |
|
|
12.07.2011, 14:56 Uhr
halbkette

|
Hallo Björn,
schau doch mal in den Thread "Das andere Kettenfahrzeug", da habe ich ( auf Seite 5/6 z.B. ) mit Bildern erklärt, wie ich einen RB35-Motor erstens zum Lenkservo und zweitens für den Hub-Antrieb des Krafthebers umgebaut habe.
Wenn du Fragen dazu hast....

--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von halbkette am 12.07.2011 16:24. |
|
|
12.07.2011, 16:38 Uhr
halbkette
|
Hallo Björn,
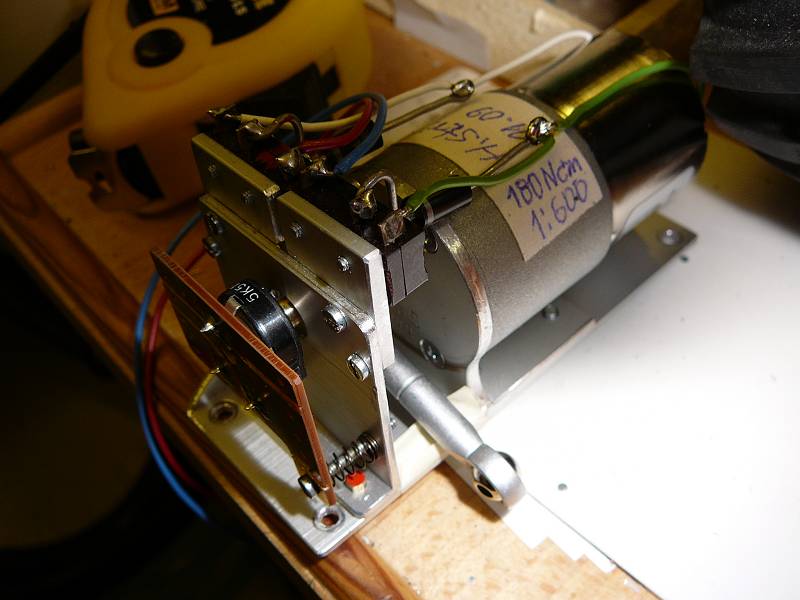
als zweites Beispiel dafür mal ein Foto vom Kraftheber-Antrieb.
Dort siehst du:
a) ein Poti an einer Verlängerung des Getriebe-Ausganges und
b) Endschalter, damit das Poti nicht kaputgefahren wird.
Über die jeweiligen el. Schaltungen könnten wir uns bei Bedarf noch unterhalten.
Die Steuerung übernimmt eine kleine Fahrtregler-Platine von Conrad für max 2 Ampere. Das reicht aber gut aus. Das Poti ersetzt per Kabel eines der Einstellpotis auf der Platine. Genaueres evtl. später.
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "

|
|
| |
|
|
12.07.2011, 16:48 Uhr
halbkette
|
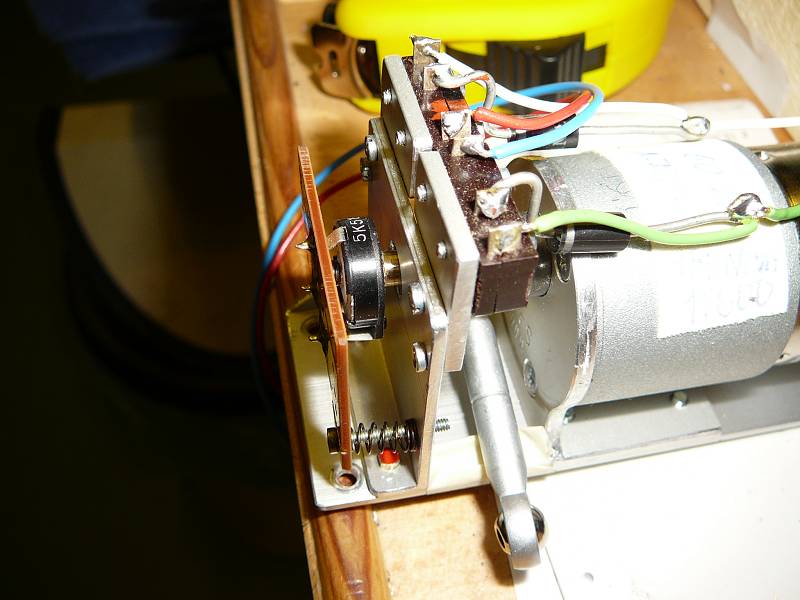
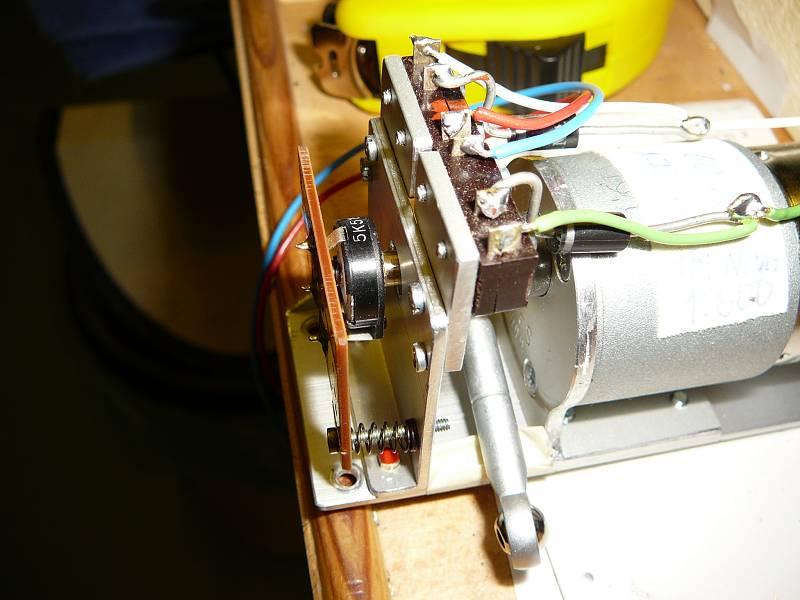
Hier vielleicht noch eine zweite Ansicht für den Aufbau:
die Poti-Platine ist nur an einer(!) Schraube lose befestigt, damit sie die unvermeidlichen leichten Bewegungen des Potis auf der Getriebe-Achse mit macht - sonst klemmt´s. In dem Poti steckt als Mitnehmer ein speziell geformtes Drehteil, das genau den Hohlraum dort ausfüllt und mit dem (Arbeits-) Hebel verlötet ist. Eine zentrale Schraube M2 hält das Poti fest. Das ist leider nicht zu erkennen.
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
| |
|
|
12.07.2011, 19:16 Uhr
Radfahrer

|
Hallo Björn!
Aus dem Bauch raus würde ich meinen, es wäre für Dich günstiger und preiswerter ein starkes, schnelles Servo mit Metallgetriebe zu kaufen. Da ist dann (bis auf eine passende BEC-Versorgung die durchaus dafür extra genommen werden sollte) alles drin und passt auch zusammen.
Hauptschwachpunkt: Die RB35er sind gute kräftige Motore, aber sie werden wahrscheinlich von der Geschwindigkeit nicht nachkommen eine Höhenstabilisierung zu schaffen.
--
Isch ´abe ga´ keine Fahrrad!
Olaf (der Radfahrer)
|
|
| |
|
|
12.07.2011, 21:22 Uhr
FURIANER
|
Nabend
Also erstmal vielen vielen Dank für eure Antworten!
Den Link von Benedini hab ich gleichmal abgespeichert, denn das finde ich schon einmal sehr gut
@Hartmut: Wieviel platz benötigt man denn ca nach vorne für den Poti und Platine?Gut also wenn ich sehe dass Du damit die Heck- und Frontkraftheber betreibst, stelle ich fest das Die kraft für meine Zwecke 100% ausreichend ist.--> Das ist mir schonmal viel wert
@Oldchap: Hmm.....wenn ich eine einfache Servoelektronik anlöten würde, würde es die bei der Last (Bordkanone Schildzapfenlager bis Rohrmündung ca.53cm, hier herrschen ca. 400gr. Zuggewicht) nicht aufrauchen?Oder hält eine "normale Servoelektronik" diesem stand?
@Radfahrer: Was würdest Du mir denn für einen Servo empfehlen?
Ist denn ein RB35 so langsam? reicht da eine Untersetzung von 1:30 oder 1:50 nicht aus?
Ich weiß.........jeder normale Mensch rechnet sich das aus, ich wiederum frage lieber, denn bevor ich aus einer Matheformel schlau geworden bin, heiratet der Papst
Gruss und Panzer Hurra
Björn
|
|
| |
|
|
12.07.2011, 23:44 Uhr
halbkette
|
Hallo Björn,
ich verstehe schon, was du meinst, aber dafür sind wir ja da - ( wir, die wir mit den Zahlen und Formeln aufgewachsen sind...)  sag einfach, wieviele Sekunden dein "Servo" benötigen darf - für einen vollen Weg und welche Winkel in Grad das sind. Das kannst du sicher messen. sag einfach, wieviele Sekunden dein "Servo" benötigen darf - für einen vollen Weg und welche Winkel in Grad das sind. Das kannst du sicher messen.
Danach kann man die Untersetzungstufe am Getriebemotor bestimmen und der Rest ist einfach.
Die Hubkraft bei 1:600 wird z.B. mit 18 kg/cm Hebellänge genannt. Das geht natürlich auch kleiner, wenn "weniger" Laufzeit wichtig ist. Irgendwas wird für deinen Bedarf schon passen - denke ich mal.
Zu den Bildern :
Die Baulänge mit dem Poti paßt gerade so in ein Gehäusemaß von rund 100mm Breite.
Aber das ist noch nicht das Ende -falls das zu groß sein sollte - das Poti läßt sich auf vielfältige Weise über Zahnräder "neben" der Getriebewelle anbauen - siehe: das neue Lenk"servo" in meinem Bericht
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von halbkette am 12.07.2011 23:45. |
|
|
12.07.2011, 23:57 Uhr
Oldchap
|
Hallo Björn,
das mit der möglichen Last hängt von der Servo-Elektronik ab. Die heutigen normal-großen Digitalservos nehmen im Betrieb schon mal 2 A oder mehr auf. Wenn Dein Getriebemotor unter Last auch nicht mehr braucht, ist das also kein Problem. Berechnen bringt da übrigens m.E. gar nix; sowas muß man an Ort und Stelle wirklich mal unter maximal vorkommender Last messen. Ein einfaches Multimeter dazu kostet heute unter 10 €, ist also kein Problem.
Ich habe z.B. im Köti 1:6 einen Getriebemotor zum Heben der Kanone mit einer solchen aus einem Servo ausgeschlachteten Elektronik bestückt (übrigens auch mit den diodenverkoppelten Endschaltern dazu, damit die Stromaufnahme an den Anschlägen nicht zu groß wird). Der Motor bringt am Abtriebshebel ganz außen ein gutes Kilogramm Druck auf und braucht dabei nur 100 Milliampere bei 5 V Empfängerspannung. Das ist für die Elektronik absolut kein Problem; das ursprüngliche Servo hat unter Vollast bedeutend mehr Saft gezogen.
Das Servo ohne die Elektronik ist übrigens für meinen naturgetreuen Rohrrücklauf zuständig. Es sorgt dafür, daß die Kanone beim Schuß schön schnell zurückläuft, aber langsam wieder vor. Dazu habe ich eine einfache Schaltung entwickelt, die so ziemlich jeder für weniger als 10 € nachbauen kann, wenn er ein Servo ausschlachtet.
--
Viele Grüße
Gerhard
|
|
| |
|
|
18.07.2011, 21:44 Uhr
FURIANER
|
Hi und guten Abend allerseits
Hmmmm................
@Hartmut: Irgendwie bin ich ja auch damit aufgewachsen, ich meine die Formeln, aber andererseits hab ich da immer gefehlt
Was die Reaktionszeit angeht...........ja wie soll ich das sagen, sie sollte so ausreichend, um eine annähernd optische Stabilisierung zu erreichen, sprich nicht nur bei langsamer sondern auch bei schnellerer Fahrt sollte die Bordkanone möglichst ruhig bleiben. Also auf jeden fall besser als bspw. die der Tamiya Leo mit der GBS.
Ich habe festgestellt, das ein 1/100 Getriebemotor anscheinend zu langsam ist, dieser aber wiederum genug Kraft hat.
@Oldchap: Wie ich oben schon geschrieben habe, muss eine schnelle Reaktionszeit vorhanden sein, die Du an dem Tiger nicht in dem Maße benötigt wird. Welchen Motor und welche Servoelektronik, ich meine von was für einem Servo, hast Du verwendet?
Gruss und Panzer Hurra
Björn
|
|
| |
|
|
19.07.2011, 02:37 Uhr
Oldchap
|
Hallo Björn,
also meine Kanonenhebeanlage vom Köti wäre vom Tempo her für eine annähernde Stabilisierung "arttypisch" viel zu langsam! Die Gesamtlaufzeit beträgt ca. 5 - 6 Sekunden. Den Motor hat der Hersteller Bigtanks schon eingebaut; dafür habe ich keinerlei Unterlagen. Die Elektronik stammt aus einem großen Hitec-Servo (die ist aber unkritisch, wenn man die Stromgrenzen beachtet).
Ein Problem könnten allerdings die Heading-lock-Kreisel werden; die wollen meist eigens dafür entwickelte, superschnelle Servos, sonst funktionieren sie nicht richtig.
--
Viele Grüße
Gerhard
|
|
| |
|
|
22.07.2011, 16:31 Uhr
FURIANER
|
Mahlzeit.
Soooo, nach vielen langen Abenden der Überlegung, werde ich für die Elevation der BK einen starken Servo nutzen, denn ich glaube der arbeitet schneller, gerade in Verbindung mit einem Kreisel bzw einer Briefmarke.
Ich möchte euch jedoch herzlich für eure Mühen danken.
@Hartmut: Deine Idee für die Heckkraftheber habe ich schon gespeichert, denn ich soll meinem Bengel noch einen Trecker bauen.
also vielen Dank und 
@Gerhard: Ja das stimmt, deine Ansteuerung der KWK muss nicht die Geschwindigkeit der eines Leopard haben, aber es ist ja immer so, dass der Enkel schneller sein muss als der Opa
Aber mal ganz ehrlich, ein KöTi mit Stabilisierung wäre damals echt der Bringer gewesen.
Also vielen dank nochmal.
PS: Werde sobald die Zeit es zulässt mal mit einem Baubericht hier anfangen.
Gruss aus Adendorf
und Panzer Hurra
Björn
|
|
| |
|
|