|
Thema:  Kanonenlageregler für moderne Panzer Kanonenlageregler für moderne Panzer |
[ - Antworten - ] |
18.12.2008, 19:33 Uhr
  moba-wilson4711 moba-wilson4711
|
Hallo,
Ich habe heute ein wenig gebastelt da 1.krank geschrieben und 2. Reste unserer Musterbauteile
vom großen Chef bekommen darunter fand sich ein Beschleunigungssensor:
Mit Ihm ist es möglich die absolute Lage zur Kraft"G"abzumessen. Bedeutet es gibt Sensorspannung ab wie schräg ein Modell steht bzw welcher Wikel hat die Kanone.
Jetzt geht mit durch den Kopf ob das nix wäre für die Gemeinde: Wenn so nen Panzer mit ausgerichteter
Kanone los fährt und diese immer quasi in der gleich Höhe bleibt.Die seitlichen Kräfte muß man testen ob
man da auch den Turm nachführen kann falsder Sensors merkt.
Im Moment hab ich den bei einem 1:35 Tamiya verbaut um eben den Winkel der Kanone zu wissen
um auch den Antrieb besser zu steuern.
Meine Steuerung läuft auf dem Prinzip Bluetooth und ich sage via PC etc :
Links vor mit xxx% Kraft Rechts dto Turm auf XXX Grad Kanone auf xx Grad.
Falls da Interesse besteht kurz melden: Ich will da so ne Art Battlesystem basteln um über diese Daten
dann auch ne Schusslösung zu errechnen die dann eventuel nen Haus rauchen läßt etc.
Ich denke das ganze ist mal was anderes kann man auch in die Großen eventuell übernehmen.
Dazu passend für die kleinen gibts ein IR System zur Pos.Bestimmung mittels IR Kamera.
Für die kleinen gibts dann jetzt auch prop- Regelung für die Tamiya allerdings steuert das dann
der PC
So genug geschwafelt ich suche halt noch Leute die Interesse an so was haben um eben die
Modelle zu pimpen Leopard M1 etc
|
|
 |
|
|
18.12.2008, 20:51 Uhr
Noid

|
hi
das hört sich interessant an.
hast du evtl. bilder der / des modules?
lg flo
|
|
| |
|
|
20.12.2008, 06:59 Uhr
moba-wilson4711
|
Hallo Flo,
Noch keine Bilder das ist alles noch auf Steckbrett/Lochraster also nix schönes :
Die Frage ist ja auch wie groß darf so was sein von den Abmessungen:der Sensor hat 4x4mm
und sitzt auf ner kleine Platine ich mach mal am Sonntag nen Foto mit ner Digicam.
Weiterhin ist auch wichtig wie die Kánone im Moment angesteuert wird:
Endweder über ein Servo oder direkt nur der Motor.
Unterschied beim Servo hab ich einen Lagesollwert aus der Steuerung während z Beispiel beim1:35
Tamiya nur den Motor hoch und runter steuere via Tasten und dewegen keinen Sollwert habe .
Den muß man dann eben irgendwie dranfummeln über die Steuerung 2004 Möglichkeiten...
|
|
| |
|
|
20.12.2008, 15:10 Uhr
halbkette

|
Hallo moba-wilson,
deine Elektronik-Kenntnisse in allen Ehren, aber deine Erklärungen dazu sind selbst für mich etwas zu genial. Wenn ich dein Konzept richtig verstanden habe, so geht es dir hier nur um die Kontrolle über die Höhenrichtung der Kanone, oder mehr???
Wenn ich mal vom praktischen Nutzen für ein Modell absehe, weil hier wohl kaum eine ballistische Geschoßbahn zu erwarten ist, bleibt immer noch die Frage, warum die Ausrichtung und Lagereglung der Kanone nach Höhe und Seite nicht weiterhin fast perfekt von den Heli-Kreiseln erfolgen sollte?
Aber, wär ja kein Wunder, wenn ich da vielleicht etwas mißverstanden habe. 
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
| |
|
|
20.12.2008, 15:43 Uhr
moba-wilson4711
|
Hallo Hartmut,
Wie gesagt der Sensor war ein rest aus einem anderen projekt und kostet ca 6,00 Eur .
Was kostet denn so ein Kreisel vom Heli, vorausgesetzt der passt in einen 1:35 hinein.
Da hast du was richtiges auch erkannt in der Endfolge will ich meinen Jungs die Physik mal bisschen
zeigen und dann ne Schusslösung errechnen lassen: (Auf PC)
Winkel der Kanone haben wir,egal wie schräg der steht weil das misst man mit, Turmdrehung also Ausrichtung kenn ich auch.So und nun muß ich via meinem Ortungssystem nur schauen ob das Ziel da steht wo man hinschießt.Eine sogenannte postive Schusslösung wie die alten U Fahrer beim Bund das nannten.
Jetzt könnte man sogar weiterspinen:Ziel dampft etc..aber egal.Mir geht hauptsächlich darum die
Kanone während der Fahrt in der Höhe konstant zu halten,wenn mehr auch möglich da drei Achsen
vorhanden
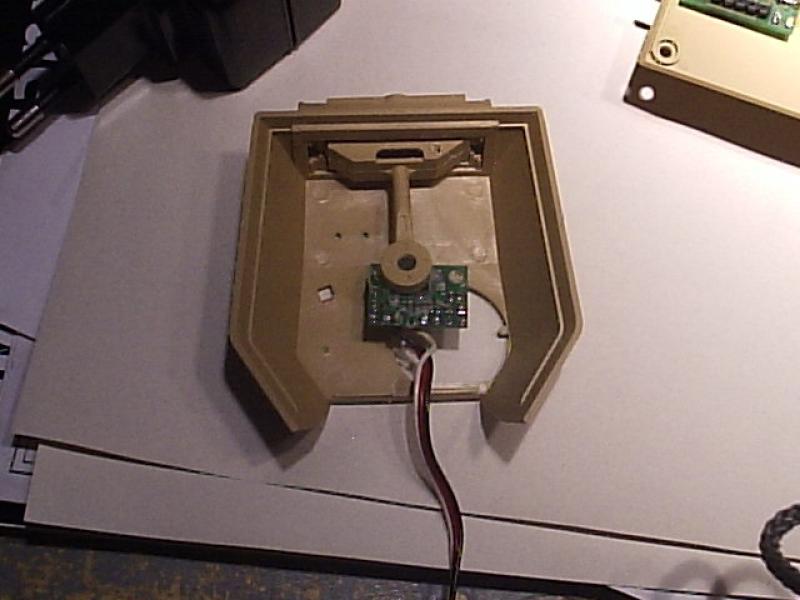
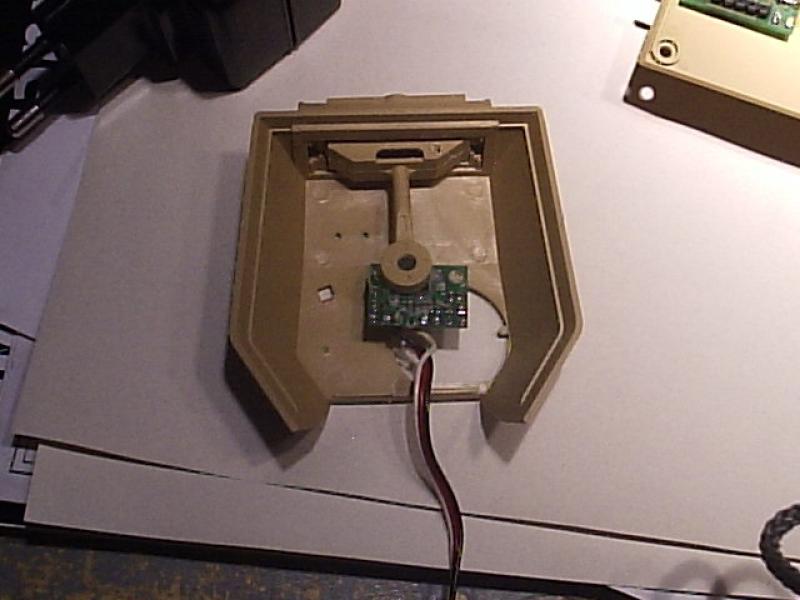
Anbei mal ein Bild vom Sensor im Turm und von der Steuerung in der Wanne das rechte ist der Proz-Sockel,
links neben der BT-Baustein. Wie gesagt alles 1:35 geplant :unter dem Proz sitzt der Motoregler für die beiden Ketten.
Und die sind stufenlos nicht wie original .
Also weiter Kritik üben vieleicht fällt einem ja noch was ein :weil die Kreiselgeschichte kenn ich zum Beispiel
nicht und bin auch lernfähig.
Nur mein Masstab ist hat relativ klein weil für nen 1:16 etc fehlt mir der Paltz und Ausrüstung.
Ich bin halt mehr der elektroniker der sich dort austobt:Geräuschmodul will ich auch noch reinbringen
Nur generell was hälst Du von der Idee den Panzer va PC zu steuern weil da kann man ja ganz neue
Ideen verwirklichen .
|
|
| |
|
|
20.12.2008, 15:44 Uhr
moba-wilson4711
|
Hallo Hartmut,
Wie gesagt der Sensor war ein rest aus einem anderen projekt und kostet ca 6,00 Eur .
Was kostet denn so ein Kreisel vom Heli, vorausgesetzt der passt in einen 1:35 hinein.
Da hast du was richtiges auch erkannt in der Endfolge will ich meinen Jungs die Physik mal bisschen
zeigen und dann ne Schusslösung errechnen lassen: (Auf PC)
Winkel der Kanone haben wir,egal wie schräg der steht weil das misst man mit, Turmdrehung also Ausrichtung kenn ich auch.So und nun muß ich via meinem Ortungssystem nur schauen ob das Ziel da steht wo man hinschießt.Eine sogenannte postive Schusslösung wie die alten U Fahrer beim Bund das nannten.
Jetzt könnte man sogar weiterspinen:Ziel dampft etc..aber egal.Mir geht hauptsächlich darum die
Kanone während der Fahrt in der Höhe konstant zu halten,wenn mehr auch möglich da drei Achsen
vorhanden
Anbei mal ein Bild vom Sensor im Turm und von der Steuerung in der Wanne das rechte ist der Proz-Sockel,
links neben der BT-Baustein. Wie gesagt alles 1:35 geplant :unter dem Proz sitzt der Motoregler für die beiden Ketten.
Und die sind stufenlos nicht wie original .
Also weiter Kritik üben vieleicht fällt einem ja noch was ein :weil die Kreiselgeschichte kenn ich zum Beispiel
nicht und bin auch lernfähig.
Nur mein Masstab ist hat relativ klein weil für nen 1:16 etc fehlt mir der Paltz und Ausrüstung.
Ich bin halt mehr der elektroniker der sich dort austobt:Geräuschmodul will ich auch noch reinbringen
Nur generell was hälst Du von der Idee den Panzer va PC zu steuern weil da kann man ja ganz neue
Ideen verwirklichen .
|
|
| |
|
|
20.12.2008, 15:46 Uhr
moba-wilson4711
|
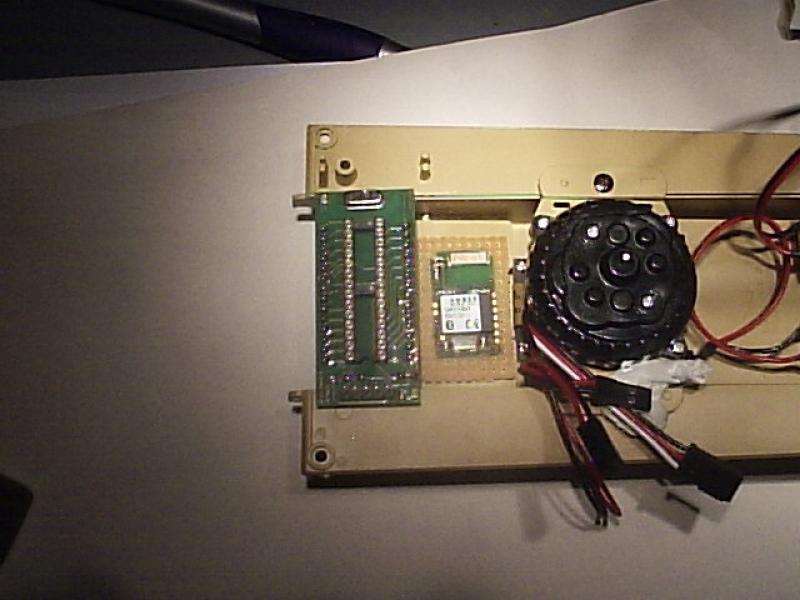
Hier noch das Bild der Steuerung die ist in Arbeit
|
|
| |
|
|
20.12.2008, 16:55 Uhr
Antiheld
|
Hallo,
könntest du bitte mal den Typ des Sensors posten?
MfG Andre
|
|
| |
|
|
20.12.2008, 17:09 Uhr
UralPit56
|
Hallo,das mit der Lageregelung der Kanone täte mich auch interessieren,aber nur wenn es funktioniert wenn der Panzer in Fahrt ist,d.h.er fährt und das anvisierte Ziel bleibt anvisiert.Wie es halt beim Leo ist.
Die Kanone selbst wäre nicht das Problem,wie du schon sagtest es sind mehrere Achsen welche stabilisiert werden müssen,nachzuführen sind.Wäre schon toll wenn es funktioniert.
MFG. Peter
|
|
| |
|
|
20.12.2008, 18:01 Uhr
Robert
BW-Meister
[Administrator]

|
Aaaahhhhh ... da isses wieder ... das Thema !!!! 
Anlauf Nr. 365 seit dem Jahre 2001  
einfach mal im Forum nach "Lageregler" oder "Waffenstabilisierung" suchen
.... na, hoffendlich gibt das diesmal etwas 
Gruß Robert
|
|
| |
|
|
21.12.2008, 00:40 Uhr
moba-wilson4711
|
Hallo Andre,
Der Sensorheißt MMA7260QT von Freescale.
Link:www.po u.com
Dort sieht man auch die Musterplatte.
|
|
| |
|
|
21.12.2008, 00:57 Uhr
moba-wilson4711
|
Hallo Robert
Ich hab wohl ins Wespennetz gestochen aber egal,ich sehe die Chancen das es klappt einfach aus einem
Grund die Nachführung muß ja normalerweise durch den Sender erfolgen mit dem normalen RCSender
kannmandas nicht der ist einfach zu doof dafür.
Mit einem Pc hat man da schon andere Möglichkeiten:
Der Blecheimer kann das ja alles in Seelenruhe auswerten und reagieren :
So fahre ich im Versuch im Moment nur "dumm" rum. Jetzt da die Ortung klappt sollder Kerl
nen Punkt anfahrn (x/y) nur die grobe Richtung mußman halt vorgeben und bei Hindernissen
eben drumrumlotsen.
Beim Turmi st das recht gut zu machen bei der Höhe nur mitdem nachdrehen muß man ander Software
noch was ackern:
Beispiel:Ziel anpos x/y ich fahre aber vom Punkt weg und muß dann die Koordinaten vom alten Platz
umrechnen auf den aktuellen Punkt.
Das wäre dann PC-Sache dereben die ganze Zeit dann Koordinaten abfrägt und dann dei Neue Einstellung
an den Turm gibt.
Aber ich bin ja froh das hier was los ist und jeder mitdenkt
Wird ein schönes Projekt da Hardware und Software schon recht anspruchsvoll werden.
Wenn die ersten Ergenisse vorliegnsehen wir weiter
|
|
| |
|
|
21.12.2008, 16:25 Uhr
halbkette
|
Hallo moba-wilson,
jetzt verstehe ich schon, wohin du willst.
Mit drei Achsen ist der Sensor auch wesentlich verwendbarer, offenbar auch viel kleiner und sehr viel billiger als Kreisel ( min. ca.50,-E ).
Die Steuerung über PC ist für einen flexiblen Versuchsaufbau ja ok, aber das Ziel ist doch wohl eine autonome Einheit, die kein Kabel mehr rumschleppen muß. Bei der Komplexität hast du dir ganz schön was vorgenommen, das wird ein weiter Weg.
Aber irgendwer muß ihn ja mal gehen, wer weiß, vielleicht kommt ein brauchbares kleines System dabei heraus.
Ich höre gern hin und wieder mal etwas Neues davon - aber selbst habe ich gerade andere Interessen.
Bleib am Ball.
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
| |
|
|
21.12.2008, 16:46 Uhr
moba-wilson4711
|
Hallo Hartmut,
Also ich will die Funkfernsteuerung durch einen Laptop zur Bedienung ersetzen.
Kabel habe ich ja nicht da drahtlose Anbindung mit Bluetooth (läuft)
Nir will ich die Regelung der Lagen vom Pc berechnen lassen im Modell gibts quasi nur
Aktoren und Sensoren die vom PC aus gesteuert werden.
Wenn jetzt mal die erste Hürde sprich Hardware läuft werde ich mich mal die PC-Software
anfangen in Java (warum Java? :dasläuft auch auf großen Handys! So hab ich ne Fernbedienung
für ein Messgerät gebaut (Display und Bedienung))
Vielleicht findet sich ja noch ein freiwilliger zum Proggen ...
Noch ein Feature seit heute drin:Softwareupdate der Controller mit PC ohne Programmiergerät.
Kabel ca10,00 und Ponyprog (Freeware)
Aber wie du schon sagst das wird nen heiden Stück Arbeit ( 1 Jahr?)
Für die Wanne habe ich mit Versuchen inzwschen schon 7 Monate und etliche Prototypenbauteile
verheizt. Aber der Lernfaktor ist enorm und es kann nix passieren außer die Kanone
läuft nicht....
|
|
| |
|
|
22.12.2008, 02:58 Uhr
mmg
|
Hallo Wilson,
ich möchte Dir die Sache sicher nicht madig reden. Aber ein Sensor macht noch keine Regelung.
Ich weiß ja nicht, wie weit Du mit der praktischen Umsetzung bist. Aber stell Dir das mal nicht zu einfach vor.
Ich sehe da einige Herausforderungen.
Der Sensor stellt für jede Achse nur ein der Beschleunigung proportionales Ausgangssignal zur Verfügung.
... Eigentlich wollte ich jetzt mit ein paar Beispielen loslegen. Aber ich sehe bei der Umsetzung so viele Probleme, dass ich gar nicht weiß, wo ich anfangen soll. Also einfach mal ein paar Stichworte...
Wie gut bist Du in Mathe? Welcher Regler (P, I, PI, PD, PID)? Wie willst Du die Parametrierung für die unterschiedlichen Modelle realisieren? Ist Java schnell genug, erst recht auf irgendwelchen Handhelds?
Zumal Du aus den Beschläunigungswerten des Sensors auf Winkel schließen mußt (viel, viel Rechenarbeit), was machst Du wenn der Panzer sich aus der Horizontalen bewegt (es ändern sich also die vom Sensor gelieferten Werte OHNE das zwingend die Waffe aus dem Ziel läuft)? Das Ganze noch für die Turmdrehung (noch mehr Rechenarbeit). Reicht ein Sensor? Oder brauchst Du vielleicht zwei? Einen in der Wanne, einen an der Waffe? Vielleich noch einen dritten im Turm, weil sich alle Bewegungen überlagern können? ==> Noch viel, viel, viel mehr Rechenarbeit!!! C, C++, Assembler?
Ich fürchte, wir werden noch auf Versuch 367 warten müssen, um ein halbwegs brauchbares Ergebnis zu sehen.
Hast Du Dir mal überlegt, warum die Lageregelung eines Ladens wie Tamiya so sch... ist? Oder warum auf der Waffenstabilisierung für den M1 der urdeutsche Siemens Lufthaken prangt?
Ich habe in einem Semester Mess- und Regeltechnik erfahren müssen, wie komplex die Regelung selbst bei einfachen einfachen Problemen sein kann.
Wie gesagt, ich möchte Deinen Enthusiasmus nicht bremsen. Aber ich sehe mit dem von Dir gewählten Sensor noch dazu in Kombination mit der Datenübertragung via Bluetooth und der externen Berechnung nicht mal den Hauch einer Chance.
Viele Grüße
Marc
|
|
| |
|
|



