02.10.2008, 18:07 Uhr
  halbkette halbkette

|
Hallo,
Freunde des Aluminium-Tigers!
Danke an alle für die freundlichen Worte und das Schulterklopfen - das bringt mich doch mal wieder gut durch den Tag.
Ihr habt recht, teilweise fehlen einige detallierte Informationen. Es sollte ja auch nur ein Überblick sein, damit der Bericht ein überschaubares Maß einhalten kann. Trotzdem werde ich natürlich jede Frage eingehend beantworten, denn ich möchte ja richtig verstanden werden.
Es wäre mir nicht schwergefallen, den Bericht mit allen Details auf mehr als das Dreifache anwachsen zu lassen. Dann wird es aber für manchen Leser eher langweilig und ich habe doch noch zwei weitere Themen hierfür auf Lager.
Zu den Fragen und Kommentaren also der Reihe nach:
@ HARRY:
Es hat lange gedauert, bis ich mich entschloß, vom Teilesammeln zum aktiven Bauen überzugehen. Da werde ich doch jetzt nicht mit aufhören ! 
@ Michael:
Eine Probefahrt steht natürlich noch aus. Nur die könnte eine gute Funktionalität bestätigen. Obwohl, die Probeläufe aufgebockt waren schon sehr befriedigend.
Sicher wird nichts kaputtgehen, denn ich habe eindeutig üppig dimensioniert, um auch "schwer kalkulierbaren Schwierigkeiten im Modellbetrieb" aus dem Wege zu gehen. Wir müssen ja nicht so kleinlich auf das Gesamtgewicht achten. Ich gehe weiter unten noch näher darauf ein.
@ Olaf:
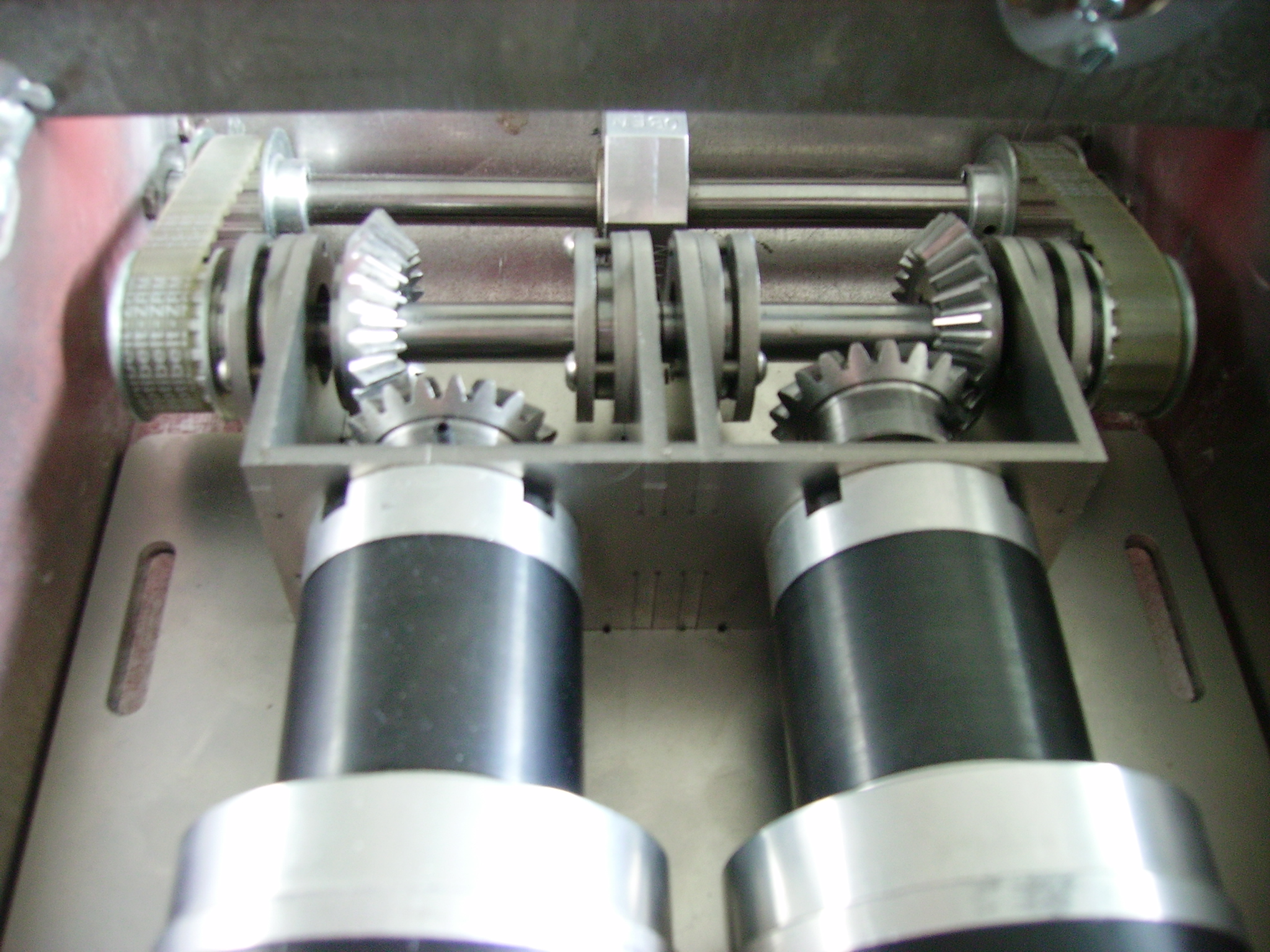
Du hast recht, es ist schwer zu sehen. Die palloidverzahnten Kegelräder brauchen natürlich auch eine Abstützung nach außen. Das haben sie auch: links im Bild wurde der Bund des Zahnrades abgestuft, damit er bei der Anlage am Mittenlager nur den Innenring des Kugellagers berührt. Ebenso rechts im Bild. Die Abstützung erfolgt hier aber fast unsichtbar an der Paßfeder-Stirnseite für die Kettenräder. Die habe ich so mit der Feile bearbeitet, bis das nötige Spiel erreicht war. Damit geht die Stützlast in die Welle und dann ins Außenlager. Sogar auf den Planetengetriebewellen habe ich noch jeweils einen Ms-Zwischenring gedreht, der eine Abstützung des Kegelrades am Getriebelager ermöglicht. Dabei mußte ich formtechnisch auch Rücksicht auf den Gummidichtring am Getriebeausgang nehmen.
@ Marc:
So war es sicher nicht, denn ich habe deinen Elan und Baufortschritt immer beneidet - in 2006, zu einer Zeit, als ich noch Teilesammler war. Und selbst heute hast du außer der Wanne schon die Grätings und sogar eine schöne Kommandantenluke - Teile, von denen wir immer noch träumen.
Wenn du schon mehr hast, vergiß nicht, das auch zu zeigen. Ich schaue auch gern bei andern über den Gartenzaun...
Zu den Wellen:
Ich sagte oben schon, dass ich aus Erfahrung gerne etwas reichlich dimensioniere, jedenfalls für den Modellbau. Deshalb kann ich dich beruhigen ( oder auch sensibilisieren ) , wenn ich sage, dass rein rechnerisch eine 8mm-Welle für die auftretenden Biegebelastungen ausreichend ist, auch noch bei kleineren Gängen und entsprechend höheren Drehmomenten ( s. 2-Gang-Schaltgetriebe, im Bau befindlich ).
Nach meiner Meinung ist das aber nicht alles, was ein kräftiges, agiles Modell im Eifer des ( Spiel-)Betriebes an Belastungen aufnehmen muß. Ich denke dabei immer an Unfälle durch Fahrfehler, die schon mal eine harte Berührung mit einem festen Hindernis und der Außenkante des Antriebsrades herbeiführen können - und das bei etwa 40 kg in voller Fahrt. Das ist wie ein ( schwer abschätzbarer ) Hufschlag auf die Antriebswelle, die nach außen immerhin noch einen Hebel von etwa 50mm zur Verfügung stellt.
Muß ich mehr dazu sagen??
Aus diesen Erwägungen heraus habe ich schon vorsorglich die vorgesehenen Wellen für die Leitrad-Exenter auf 8mm erhöht, indem ich völlig neue Schwingen aus Stahl gebaut habe. Die stelle ich demnächst auch hier vor. Die von Stehr aus Alu gegossenen Schwingen mit 6mm-Wellen schienen mir für einen Crash im Rückwärtsgang nicht ausreichend dimensioniert.
Zusätzlich habe ich in diesem Bereich noch eine Kettenreiß-Sicherung entwickelt und eingebaut, die gleichzeitig das Leitrad abfedert und trotzdem die Kette spannt. Auch darüber werde ich demnächst berichten.
Ich wollte hier nur meine Motive für die Dimensionierung über die rein rechnerische Notwendigkeit hinaus beleuchten.
Alte Hasen sind halt alt geworden, weil sie vorsichtig sind.
Ein weiterer Beweggrund dafür ist die Unlust, mal wieder einiges reparieren und ersetzen zu müssen...
@ Reiner:
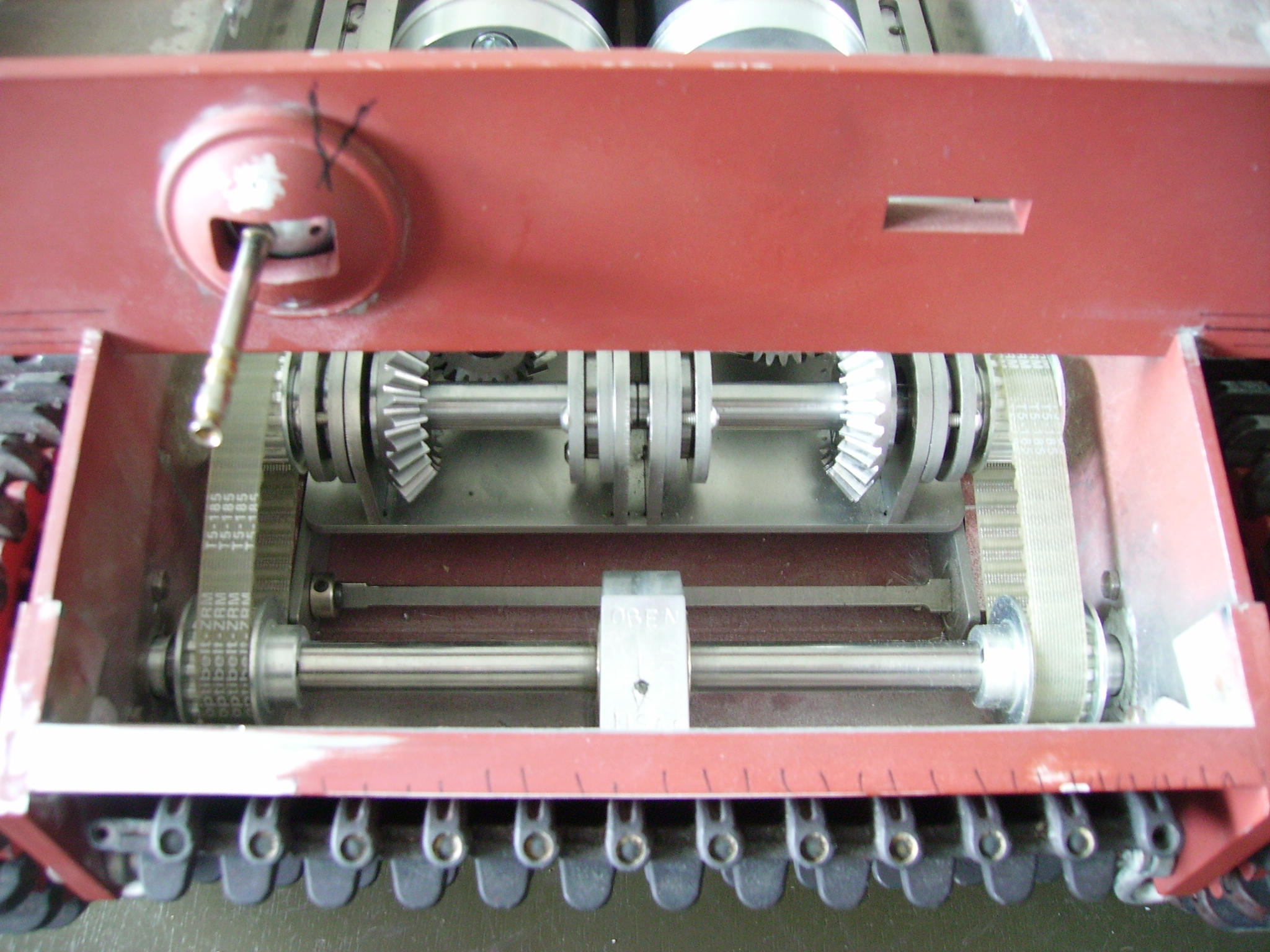
Ist mir schon klar, dass die Rollenketten auch einfach ausgereicht hätten. Aber auch hier gilt für mich das oben Gesagte. Außerdem greift hier weiter ein wichtiger, bisher noch nicht erwähnter, Punkt : "der Verschleiß" von umlaufenden und im Eingriff stehenden Getriebeteilen.
Nun Rollenketten verlieren in erster Linie ihre Form auf Dauer - dafür der Kettenspanner. Aber Fett brauchen sie auch und ich wollte ebenso Wartungsfreiheit erreichen, weil mir noch nicht klar ist, ob ich die Bugplatte zum Öffnen oder fest verschraubt baue.
Beim Kurvenfahren wird ( bis jetzt ) noch kein Motor abgebremst. Die ersten Fahrversuche ( auf Rasen ) mit der Wanne von Hans ( Sutti ) haben diese Frage nicht aufgeworfen. Vielleicht tritt auf Steinboden der Fall ein. Eigene Versuche habe ich noch nicht unternommen. Für den möglichen Fall, dass... habe ich ja noch das Ü-Getriebe in Planung.
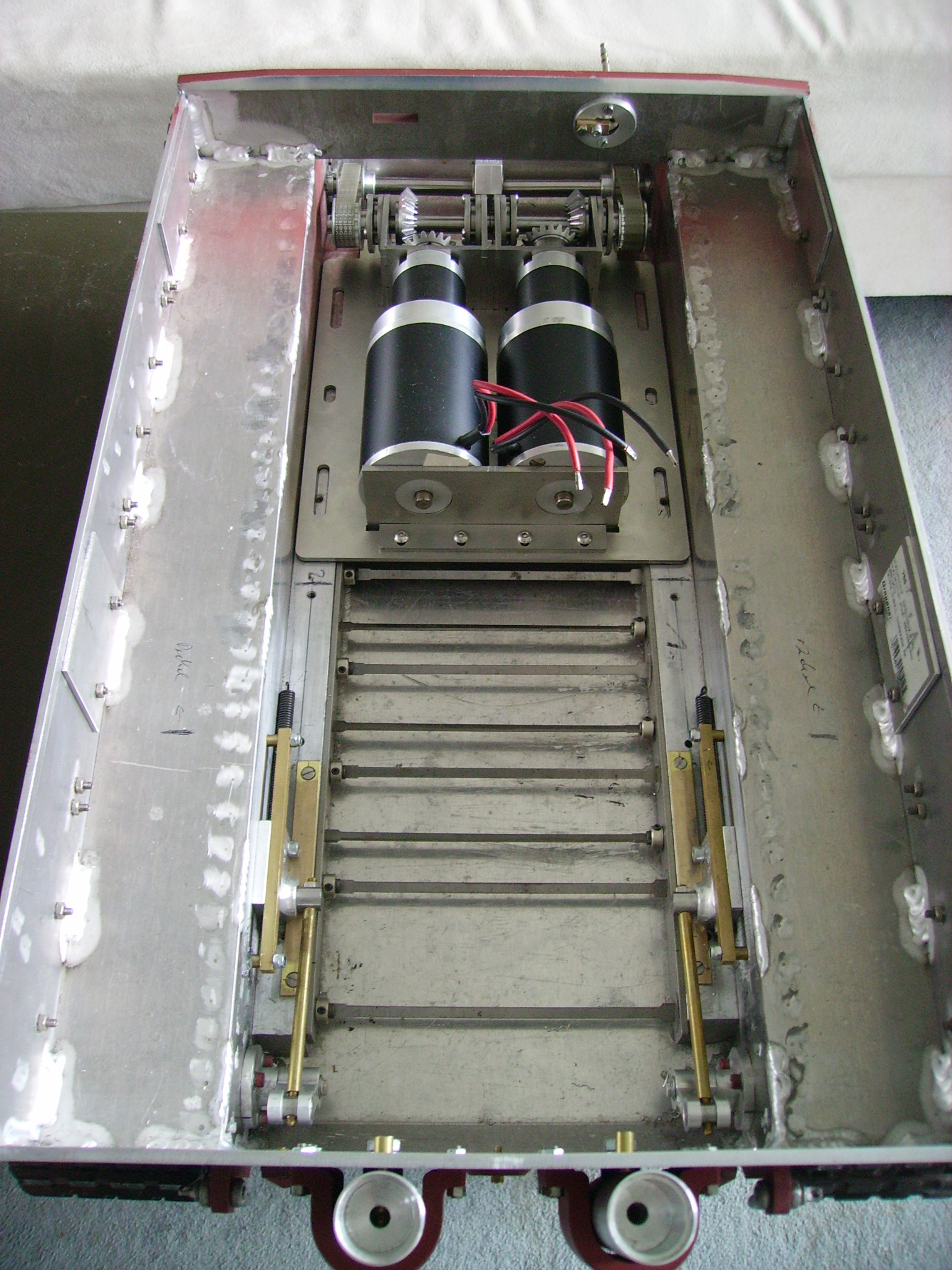
Als ich zu der Gruppe stieß, war die Tiger-Planung ja schon gelaufen und ich habe also die bereits angeschafften Motoren übernommen. Wie ich dann später nachgerechnet habe, waren sie für unser Modellgewicht ausreichend bemessen worden mit einer Abgabe(!)-Nennleistung von 85 Watt bei 12 Volt Nennspannung. Die Abbremsleistung kann bis über 200 Watt steigen - dann aber bei sinkenden Drehzahlen natürlich .
Das angebaute Planetengetriebe hat eine Untersetzung von gut passenden i=1:13. Das max.Drehmoment am Ausgang darf 8 Nm betragen. Etwa 7 Nm erreichen wir am Hang. Die Zahlen habe ich jetzt aus dem Gedächtnis und nicht weiter mit meinen Aufzeichnungen kontrolliert.
So, das waren noch einige fehlende Detail-Informationen zum besseren Verständnis.
Im übrigen bin ich nicht traurig, wenn meine Berichte zum Nachbau anregen.
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|

|
|
|



 .
.