|
Thema:  Waffenstabilisierung Leo Eigenbau mit Multiwii Waffenstabilisierung Leo Eigenbau mit Multiwii |
[ - Antworten - ] |
19.03.2017, 00:25 Uhr
  Squirlier Squirlier
|
Hallo Olaf,
wenn ich das richtig verstehe bist du der Meinung das "richtige" Stabis nicht das Servosignal verändern würden?
Und du bist somit der Überzeugung das die StabiWii Sache somit niemals gut funktionieren kann?
Weiter:
"Auf diesem Wege könnte man der ohnehin ständig korrigierenden Servoelektronik statt dem Plattformfesten Servogehäuse den virtuellen Horizont "zu fressen" geben"
Was aber ja wieder die veränderung eines Signals wäre. nur nicht am eigentlichen Signaleingang. sondern auf Umwegen zwischen dem Poti und der Servoelektronik..
Das ist so als ob ich eine Tafel Schokolade nicht von links sondern generell von rechts esse da von links gegessen die ja nicht schmecken kann..
Ein Servo hat 3 Dinge die es zum Leben braucht. (Strom lass ich mal weg)
1. Servosignal (vom Empfänger oder irgendeiner Steuerung)
2. Die Servoelektronik (Motortreiber usw.)
3. Das Poti. (heutzutage gerne auch andere Messeinrichtungen)
Was passiert nun in dem Servo?
Das Eingangssignal gibt etwas vor.
Das Poti gibt ebenfalls etwas vor.
Die Elektronik schaut sich die differenz an und korrigiert.
Wo ist nun der unterschied an welchen beiden Punkten ich ansetzte (Regeltechnisch)?
1 und 3. wird verglichen und 2. korrigiert die Differenz.
Deine idee scheint m.E. nach einfach unnötig kompliziert und macht am Ende genau das gleiche. Und zwar die Servoelektronik beeinflussen.
Das von dem du sprichst könnte auch ein Getriebemotor mit Drehzahlregler (vorwärts/rückwärts) sein.
Dann müsste der Sensor halt am Rohr befestigt werden. So hätte man zumindestens ein Signal vermieden.
Was aber bleibt ist das Spiel in der Mechanik. Und da kommt es auf das zusätzliche "Signal" nicht mehr an, da die Ungenauigkeiten die davon ausgehen einfach unter gehen.
Irgendwie kommt mir mein Kommentar hier jetzt soooo bekannt vor... Hmmm..
--
Projekt:Multiwii Stabilisierung für Panzer
StabiWII Software usw.
|
|

|
|
|
19.03.2017, 21:21 Uhr
Radfahrer

|
Hallo Christian,
das sollte keine Kritik sein. Ich schrieb ganz zu Anfang "...meiner Ansicht nach..." - Du hast es anders gemacht und bist selbstverständlich davon überzeugt, wie und was Du tust. Ich habe nicht geschrieben, das Deine Lösung niemals gut funktionieren könnte. Sie ist unter dem Gesichtspunkt der einfachen Installation und späteren Reparatur sogar sehr gut.
Um auf Deine Analogie mit der Schokoladentafel mit einer anderen Redensart zu antworten: Die Höhenrichtvorgabe zu ändern, um die Bewegung des Trägerfahrzeuges zu kompensieren ist wie ein Pferd von hinten aufzuzäumen. Meiner Ansicht nach. Der Höhenrichtwert ist ja nicht falsch, weil das Fahrzeug und damit das Servo nicht waagerecht im Raum verweilt. Falsch ist die Annahme des Servos, das Poti wäre der Nabel der Ausricht-Welt, aber es ist eine Blackbox und kann es nicht besser wissen.
Sorry, wenn das wie ein Angriff bei Dir rüber gekommen ist, meine Absicht war lediglich, auch andere Ideen für mögliche Lösungen für weitere Mitleser einzustreuen. Ich wünsche Dir weiterhin viel Spaß und Erfolg mit Deinem Lösungsweg.
--
Isch ´abe ga´ keine Fahrrad!
Olaf (der Radfahrer)
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von Radfahrer am 19.03.2017 21:38.
|
|
|
19.03.2017, 22:42 Uhr
Squirlier
|
Hallo Olaf,
als Angriff hab ich das nicht verstanden.
Ich sehe unseren Beiträge als Gedankenaustausch an.
Von daher ist von meiner Seite aus alles ok.
Ich verstehe deinen Standpunkt nicht. Zitat:
"Der Höhenrichtwert ist ja nicht falsch, weil das Fahrzeug und damit das Servo nicht waagerecht im Raum verweilt."
Das Rohr ist doch am Fahrzeug befestigt. Über einen Drehpunkt und einen "Anlenkpunkt".
wenn der Anlenkpunkt nun einfach eine Stange wäre die ebenfalls fest und starr im Fahrzeug befästigt wäre, würde das Rohr immer der Ausrichtung des Fahrzeuges folgen. (Sie kann ja nicht anders).
Die Stange muss also durch eine in der länge veränderliche Sache ersetzt werden. (Hydraulik, Servohorn mit Stange oder sonst was.)
Dann könnte man die "Ausrichtung in der Höhe schon mal verstellen.
Das bedeutet aber auch wenn ich nicht verstelle, dann ist die Ausrichtung des Fahrzeugs immer maßgeblich.
Den Teil den ich verstelle um einen punkt zu halten muss so verändert werden wie das fahrzeug seine lage verändert.
Versteht man was ich hier schreibe?
Das Servo selber glaubt ja nix. Es schaut was gefordert ist und stellt das dann ein.
Es bleibt also die Frage woher bekommt es die die aufforderung eine bestimmte stellung einzunehmen.
Und das kommt über das Steuersignal. Das Steuersignal wird aufgrund der Fahrzeuglage verändert.
Wie ich oben versucht habe aufzuführen ist die Fahrzeuglage ja veränderlich (Gelände).
Und die wird erfasst was zu einer korrektur am Servo führt was zu einer veränderung des Rohres(Winkel) im Bezug zum Fahrzeug führt.
Evtl. ist nicht gut herüber gekommen (oder ich hab es nicht verstanden) wie die Steuerung funktioniert.
Die hat nicht nur einen Sensor der die veränderung (beschleunigung drehend) erfasst.
Sondern auch den "Anziehungspunkt" des Ihn umgebeden Schwerkraftfeldes.. (Also der Erde in unserem Fall)
Das bedeutet die Steuerung weiß wie schief das Fahrzeug gerade steht und kompensiert das und gibt das an das Servo passend weiter.
Na ja. so passend nun auch wieder nicht, da der Code die Hebellängen am Servo und Rohr nicht berücksichtigt.
Ist es evtl das was du meinst?
Aber den Sensor am Rohr zu befestigen ist natürlich möglich, nur müsste der Code dann etwas "angepasst werden".
Der aktuelle Code macht eine Anpassung des Signals mit maximal 200Hz.
Bei normalen Servos auch weit weniger mit ca 50Hz.
Intern berechnet der Code allerdings etwas schneller.
--
Projekt:Multiwii Stabilisierung für Panzer
StabiWII Software usw.
|
|
|
|
|
|
19.03.2017, 23:05 Uhr
Elch67

|
Guten Abend ihr beiden,
sollte es nicht so sein dass dass eine manuelle Nachregelung des Niveaus des Rohrs möglich ist?
Ziel ist das Ziel?
Es ist doch so dass man beim "Bätteln" eh manuell nivelieren muss.
Wenn dann aber die Differenz des Status ausgeglichen wird isr das voll ok.
Optische Zielsysteme mit Erfassung und Umsetzung sind Utopie.
Wenn es halbwegs funktioniert ist das doch optisch geil.
Dynamische Waffenschauen zeigten es in den 90ger Jahren.
Und noch etwas, wenn Jemand Neuland betritt und seine Erfahrungen mitteilt ist das doch positiv zu beachten.
Ich wünsche Christian auf jedem Fall weiter viel Spass beim Entwickeln und weiter machen.
Hut ab.
LG Martin
--
|
|
|
|
|
|
20.03.2017, 00:00 Uhr
Radfahrer
|
Hallo Christian, hallo Mitleser,
der fundamentale Unterschied Original - Modell ist, dass der Richtschütze ein wackelfreies Bild des Zieles braucht. Das Rohr muss hingegen so ausgerichtet werden, dass das Ziel getroffen wird. Beim Modell langt es für das Betrachterauge, wenn das Rohr im Verhältnis zur fest stehenden Umgebung seine Richtung bei behält. Das ist schon mal eine echte Vereinfachung.
Ohne Stabilisierung haben wir ein Problem. Weil das Servo seine Lage im Raum nicht kennen kann und lediglich einen Winkelwert bezüglich seines Gehäuses und des Steuersignals zu Grunde legt. Das Rohr bleibt fix zum Fahrzeug entsprechend des Steuersignals.
Der Gedanke, der oft verfolgt wird ist nicht verkehrt. Um eine stabil aussehende Rohrlage zu erreichen, müsste man nur fortlaufend das Signal zwischen Empfänger und Servo so korrigieren, so dass das Servo die Bewegung des Fahrzeuges ausgleicht. Das macht auch Christians Multi-Wii.
Mein Gedanke ist wie oben geschildert, wenn man statt einem "dummen" Servo einfach eines hätte, was gleich als Bezugspunkt einen "künstlichen Horizont" hernähme, hätte man erst gar keinen Bedarf am obigen Weg.
--
Isch ´abe ga´ keine Fahrrad!
Olaf (der Radfahrer)
|
|
|
|
|
|
22.03.2017, 01:03 Uhr
Squirlier
|
quote:
Original von Radfahrer:
Hallo Christian, hallo Mitleser,
der fundamentale Unterschied Original - Modell ist, dass der Richtschütze ein wackelfreies Bild des Zieles braucht. Das Rohr muss hingegen so ausgerichtet werden, dass das Ziel getroffen wird. Beim Modell langt es für das Betrachterauge, wenn das Rohr im Verhältnis zur fest stehenden Umgebung seine Richtung bei behält. Das ist schon mal eine echte Vereinfachung.
Ohne Stabilisierung haben wir ein Problem. Weil das Servo seine Lage im Raum nicht kennen kann und lediglich einen Winkelwert bezüglich seines Gehäuses und des Steuersignals zu Grunde legt. Das Rohr bleibt fix zum Fahrzeug entsprechend des Steuersignals.
Der Gedanke, der oft verfolgt wird ist nicht verkehrt. Um eine stabil aussehende Rohrlage zu erreichen, müsste man nur fortlaufend das Signal zwischen Empfänger und Servo so korrigieren, so dass das Servo die Bewegung des Fahrzeuges ausgleicht. Das macht auch Christians Multi-Wii.
Mein Gedanke ist wie oben geschildert, wenn man statt einem "dummen" Servo einfach eines hätte, was gleich als Bezugspunkt einen "künstlichen Horizont" hernähme, hätte man erst gar keinen Bedarf am obigen Weg.
--
Isch ´abe ga´ keine Fahrrad!
Olaf (der Radfahrer)
Ok. Wenn es also ein Servo gäbe das einen künstlichen Horizont eingebaut hätte wäre es auch anders möglich.....
Das wäre für technisch und elektrisch unbegabte Menschen dann sicherlich der Weg der Wahl.
Man hat zwar keine extra Features wie Servowegbegrenzung usw. aber das kann man ja mit Hebellängen ausgleichen.....
Dann passt zwar der Horizont am Ende nicht mehr aber man kann ja behaupten das gerade auf ein beweglichen Ziel gerichtet ist.....
Aber jetzt bitte keine "Stellpotis" ins Rennen werfen.... ;-)

--
Projekt:Multiwii Stabilisierung für Panzer
StabiWII Software usw.
|
|
|
|
|
|
05.05.2017, 14:52 Uhr
Zebolon

|
Hallo Christian,
hast Du eventuell einen Anschlussplan, in dem man die Verkabelung erkennen kann? Wenn ja wäre schön, wenn Du diesen dann hier einstellen könntest.
Vielen Dank
Peter
--
http://www.hpk-modellbau.de
|
|
|
|
|
|
12.04.2019, 12:04 Uhr
Andi76

|
Hallo Christian (Squirlier),
ich habe wieder mal Zeit gefunden, meinem Abrams 1:8 aus dem Keller zu holen und eine "Kampfwertsteigerung" anzugehen (2,4 GHz, neue Elektronik, etc.).
Nun bin ich auf Deinen Post von der WSA gestoßen. Allerdings ist Euer letzter Post etwas her.
Ich wollte gerne wissen, ob es einen aktuellen Stand gibt, bzw. ich würde mich dafür interessieren, "dat Ding" in meinen einzubauen.
Oder kann mir ein anderes Forumsmitglied weiterhelfen?
Mit kameradschaftlichen Gruß
Andreas
--
Was ist das größte Glück für einen feindlichen Grenadier ???
Wenn ein Leo auf ihm ausrutscht.
|
|
|
|
|
|
12.04.2019, 15:36 Uhr
Oldchap

|
Zu der hier diskutierten Lösung weiß ich nichts, aber ein Kollege hat den Stelzerschen Stabi auf große Modelle umbauen lassen und meldet, daß das Teil in seinem 400 kg - Leo II gut funktioniert! 
--
Viele Grüße
Gerhard
_________________________
Bigtanks-Köti 1:6, Hermann-Porsche-Köti 1:6, Bigtanks-Jati 1:6, Armortek-Japa 1:6, Spearhead Pz. IV 1:6
|
|
|
|
|
|
12.04.2019, 18:54 Uhr
jhamm

|
Hallo Andreas,
es gibt ein neueres Videos Tutorial vom Squirlier zur Programmierung des Arduino:
VIDEO
Ich habe es damit geschafft die Stabi aufzubauen - nach kurzer Eingewöhnung auf die Ardunio IDE ist es doch recht einfach.
Man muß den Arduino Uno noch entsprechend "zurechtlöten" und mit Stiftleisten ausrüsten.
Die Parametriersoftware wird in den Videos erklärt.
Die Stabi funktioniert nicht so gut im Zusammenspiel mit einer Panzerelektronik wie Elmod, IBU usw.
Ich empfehle die Kanäle für Rohrelevation und Turmdrehung direkt auf die Stabi zu legen, dazu zwei Kanäle mit Dreistellungsschalter und man kann die Stabi voll ausnutzen.
Der integrierte Rohrrückzug funktioniert übrigens sehr gut.
--
Grüße
Jürgen
|
|
| Beitrag 2 mal editiert. Zuletzt editiert von jhamm am 12.04.2019 18:59.
|
|
|
16.04.2019, 14:44 Uhr
Andi76
|
Erst mal vielen Dank für die schnelle Antworten von Euch (Oldchap und JHamm).
Ich habe nachgeschaut, wo man das MultiWii oder NanoWii kaufen kann, aber entweder bin ich zu verpeilt zu suchen, oder ich bin zu ...
Bin Mechaniker.
Wo bekommt man das Original, bzw. die China-Ware?
Das Video mit der Rohrrückzugs-Funktion mit Rauch sieht gut aus. Habe mir soeben neue Arbeit aufgehalst.
Wird eine Herausforderung den BigTank-Abrams auf Rohrrückzug mit Rauch umzubauen.
--
Was ist das größte Glück für einen feindlichen Grenadier ???
Wenn ein Leo auf ihm ausrutscht.
|
|
|
|
|
|
16.04.2019, 22:42 Uhr
jhamm
|
quote:
Original von Andi76:
Wo bekommt man das Original, bzw. die China-Ware?
Hallo,
MultiWii oder NanoWii gibt es schon länger nicht mehr.
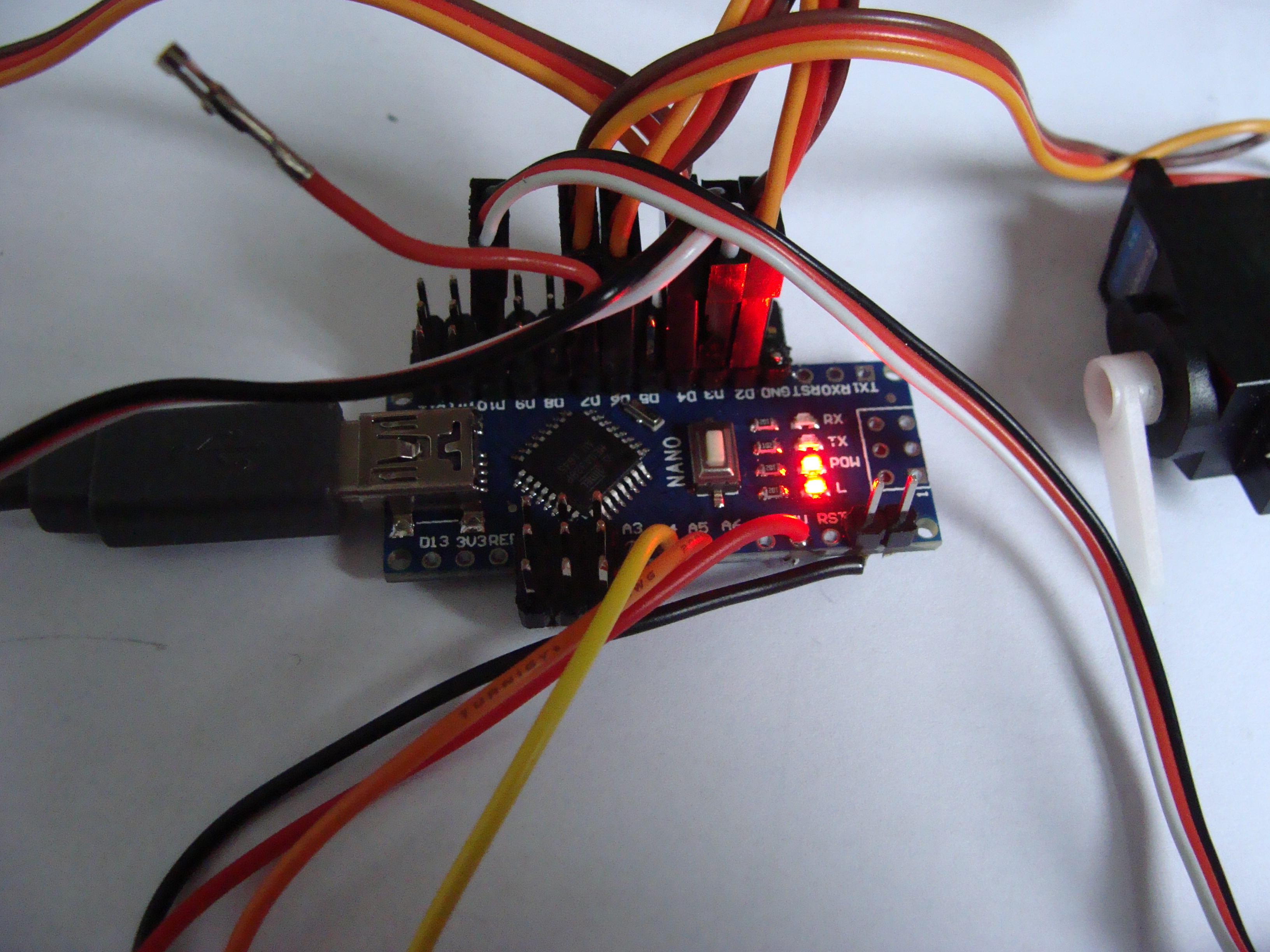
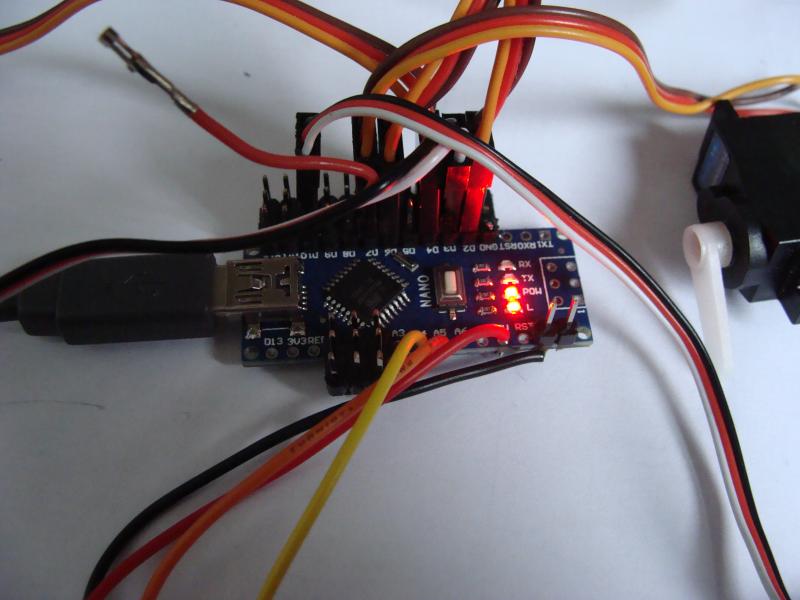
Ich habe einen ArduinoNano V3 mit externem Beschleunigungssensor verwendet, das wird von Squirlier im Video-Tutorial
auch vorgestellt.
Nach Anschlußplan verwendet man die Beschaltung Crius 328P:

Hier mein Arduino:



Hier die erforderlichen Teile:
162449468153 Beschleunigungssensor GY-521
264244447076 Arduino Nano V3
253274562800 Arduino Anschlussklemmen Shield
Vorweg sind die Auktionsnummern von ebay...
--
Grüße
Jürgen
|
|
| Beitrag 3 mal editiert. Zuletzt editiert von jhamm am 16.04.2019 22:59.
|
|
|
17.04.2019, 11:44 Uhr
Andi76
|
Hallo Jürgen.
dann werde ich mich gleich ans Bestellen machen.
Nur mit dem Programmieren wird es holprig. Meine letzte Programmiersprache war "Turbo Pascal 7".
Kannst Du mir sagen, für was das große und kleine Board oben links und rechts ist?
Denn, wenn alles klappt, dann denke ich auch an weitere Optionen nach (wie schon gesagt: Rohrrückzug, Schuß-nebel, Schuss-Blitz, in ferner Zukunft Kamera???).
Kann ich Dich auch per PN anschreiben?
Besten Dank, Andi
--
Was ist das größte Glück für einen feindlichen Grenadier ???
Wenn ein Leo auf ihm ausrutscht.
|
|
|
|
|
|