21.11.2004, 20:58 Uhr
  Fixa Fixa
Exilberliner

|
Schön das die Maus noch lebt, ich dachte schon sie ist an Altersschwäche gestorben;D
Das hört sich ja nach ordentlich Arbeit, was da auf dich zukommt.
Viel Spaß und Erfolg.
Gruss Felix
--
http://www.plastikkram.de
|
|

|
|
|
21.11.2004, 21:07 Uhr
Radfahrer

|
Hallo Felix!
Jo der Antrieb ist ja nur ein Baustein, natürlich der wichtigste.
-Ich muß die Wanne sowieso ganz ausräumen, die Bohrungen für die Verschraubungen der Fahrwerkplatten sollen wieder abgedichtet werden und dann bekommt sie eine Innenlackierung, um die verschiedenen Materialien und die häßlichen Dicht-Nähte zu kaschieren.
-Die Fahrwerkplatten selbst und die Fahrwerkteile werden auch lackiert, aber erst nachdem ein vernünftiger Leitrollenhalte/Kettenspannmechanismus erstellt ist.
-Der Turm wird mit der Kanonenanlage ausgestattet und motorisiert.
-Das Äußere mit Turm- und Wannendach wird detailiert und der Abwurftank angebracht.
-Außenlackierung.
Alles in allem wird es sicher knapp und vermutlich auch wieder nicht im gesetzten Zeitrahmen hinlangen aber mal sehen...
--
cu
Olaf (der Radfahrer)
|
|
|
|
|
|
21.11.2004, 21:33 Uhr
Struppi

|
@ Olaf
Das ist alles Theorie!
INST! nicht kleckern sondern klotzen!!
MfG Mario

|
|
|
|
|
|
22.11.2004, 10:09 Uhr
tigerbauer1969
|
Hallo Radfahrer!
Ich weiß ja nicht,ob du es schon gemacht hast,aber wie wäre es an den Achse eine kleine Fläche dranzufeilen,an denen dann die Stiftschrauben anliegen?Damit ist das Problem mit dem Grat und Verdrehen passe.Übrigens,ein klasse Projekt...
Gruß Wenzel
|
|
|
|
|
|
05.09.2005, 21:49 Uhr
Radfahrer
|
Hallo Freunde der Pelztiere!
Nachdem ich hier lange nichts von meinem Langzeitprojekt Maus in 1:16 habe hören lassen nun mal ein kleines Update was sich seit dem getan hat.
Schwerpunkt der Arbeit war der Antrieb. Ein RC-Modell das nicht fahren kann ist ein Standmodell. Sowas baue ich nicht.  Aber das in dem Maßstab relativ hohe Fahrzeuggewicht, die breiten gobstolligen Ketten in Verbindung mit einer großen Auflagelänge verursachen Kräfte auf den Antrieb die ich so nicht vorhergesehen hatte. Ich mußte einiges verstärken und ändern um einigermaßen voran zu kommen. Nachdem sie sich (mit auftretenden defekten) aber nun aber einigermaßen bewegt gehe ich denk nächsten Schritt und fange mit den weiteren Arbeiten an. Zunächst der Turmdrehantrieb: Aber das in dem Maßstab relativ hohe Fahrzeuggewicht, die breiten gobstolligen Ketten in Verbindung mit einer großen Auflagelänge verursachen Kräfte auf den Antrieb die ich so nicht vorhergesehen hatte. Ich mußte einiges verstärken und ändern um einigermaßen voran zu kommen. Nachdem sie sich (mit auftretenden defekten) aber nun aber einigermaßen bewegt gehe ich denk nächsten Schritt und fange mit den weiteren Arbeiten an. Zunächst der Turmdrehantrieb:

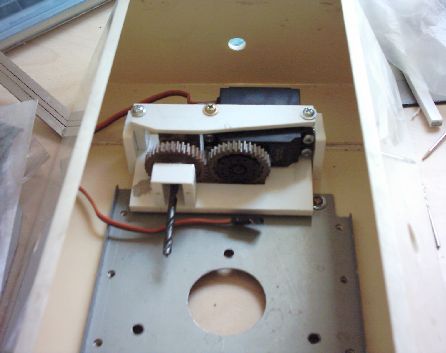
Ein Getriebemotor mit ordentlich hoher Untersetzung wirkt über einen Zahnriemen auf den Turmdrehzapfen. Auf den Bildern noch mit einer provisorischen Reiblösung, ich werde aber noch einen "Zahnkranz" schnitzen.

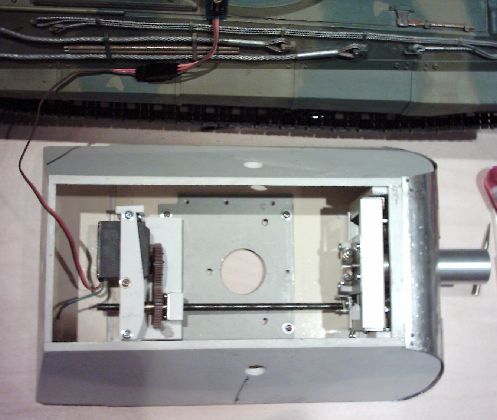
Noch ein Bild zum Fahrwerk. Die Überlegung war alle Teile auf Tragplatten zusammen zu fassen um sie zu Reparatur- und Wartungszwecken leicht demontieren zu können. Ferner sollten keine Teile ins Wanneninnere ragen um die Wasserdichtigkeit der Konstruktion zu gewährleisten. Inzwischen haben die Leiträder eigene kleine Tragplatten um sie besser einstellen zu können, damit wird die Kettenspannung justiert.

Auch schon fertig, aber noch nicht abgelichtet, ist die Rohrwiege. Dazu die Tage mehr.
--
cu
Olaf (der Radfahrer)
|
|
|
|
|
|
23.06.2007, 23:47 Uhr
Radfahrer
|
Hallo Freunde der Großkettenfahrzeuge!
Nach langer Pause, in der das Maus-Projekt teilweise stagnierte oder nur langsam voran kam, habe ich nun wieder angefangen intensiver zu basteln.
Der Antrieb wurde demontiert um ihn zu überarbeiten. Auch das Fahrwerk muß nochmal teilweise verbessert werden.
Einige Teile wird auch mein Haus und Hof Metaller Peter II für mich drehen und fräsen.
Los geht es mit der Rohrhebemechanik. Ich verwende dafür einem Schubspindeltrieb mit einem geknackten Servo als Motor. Sie funktionierte auch bisher schon gut, nur hatte sie weder eine Positionskontrolle noch eine Endlagenabschaltung. Mehr als einmal habe ich daher aus Unaufmerksamkeit die Rohrwiege in den Anschlägen festgefahren. Um das Problem zu lösen, habe ich einfach das Servopotentiometer aus dem geknackten Servo ausgelagert und über eine Schlitzaufnahme direkt an die Rohwiegenachse geflanscht.
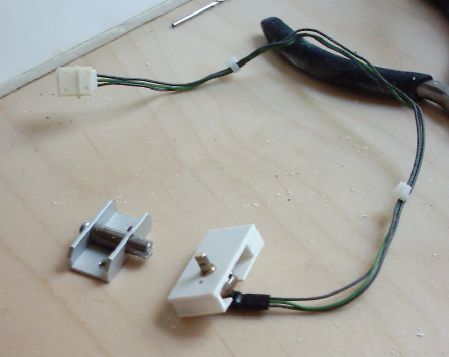
Nun kann die Servoelektronik die Lage checken und die Rohrhöhe entsprechend der Steuerknüppelstellung am Sender regeln. Da aber die Rohre nur um insgesamt 30° verstellt werden können, ein Servo aber 60-90° dreht, muß das ganze angepasst werden. Auch soll ja an Endanschlägen der Spaß zuende sein. Leute mit einer Computerfunke lächeln nun, ich habe mich mit einem Baustein von groß-C beholfen. (227372/73/75). Dieser beinhaltet eine Failsafefunktion und eine Servowegbegrenzung. Nach einigen Fehlversuchen und mechanischen Justagen habe ich das ganze auch zum Laufen bekommen. Da ich einen Linearschieber für die Steuerung der Rohrhöhe nutze, ergibt sich aber ein nur ganz kleiner Stellweg "am Knüppel". Nun gut, wir wollen ja auch nicht tatsächlich Ziele anpeilen mit der Geschichte.
Ich habe im Zuge des Umbaus auch noch die Mechanik überarbeitet. Bislang war die Kinematik des Hubantriebes ungünstig, was das Spiel in der Mimik vergrößerte. Das ist nun behoben und die ganze Konstruktion auch etwas verstärkt und optisch aufgehübscht.
Hier das ganze im Turm der Maus eingebaut. Der Köti gibt sozusagen Starthilfe  ... ...
--
cu
Olaf (der Radfahrer)
|
|
|
|
|
|
24.06.2007, 12:15 Uhr
 Vossi3 Vossi3

|
Moin Olaf,
ich habe Deinen Bericht mal in den Bereich Bauberichte verschoben.
Gruß
Jan
|
|
|
|
|
|
24.06.2007, 12:37 Uhr
halbkette

|
Hallo Olaf,
ich lese hier nur ganz zufällig mit und stolpere über dein Problem mit dem kleinen Stellweg für die Rohrhebung.
Wenn ich deine Beschreibung richtig verstanden habe, läßt sich das doch ganz einfach mechanisch verbessern, indem du das Poti nicht direkt sondern über ein kleines Getriebe an die Rohrhebeachse anschließt.
Ein Getriebe, bestehend aus zwei kleinen Zahnrädern ( kann Kunststoff sein ) , die etwa 1:3 "ins Schnelle" übersetzen. Der Zahneingriff sollte dabei möglichst sorgfältig und spielfrei ausgeführt werden. Auf der Potiachse soll das kleinere Zahnrad befestigt werden. Du verstehst sicher , wie ich das meine: damit dreht sich dein Poti bei 30° Rohrhebung dann 90° und der Hebelweg am Sender ist wieder normal zu nennen.
Das fiel mir nur spontan beim Lesen ein, vielleicht verhilft es dir ja zu etwas mehr Komfort. 
Deine Maus ist sicher ein interessantes Bauprojekt, das dir offensichtlich gut gelungen ist.
Schade, dass es als Fahrzeug nicht so sehr meine Wellenlänge trifft...
Trotzdem viel Erfolg.
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
|
|
|
|
24.06.2007, 20:45 Uhr
Radfahrer
|
Hallo Hartmut!
Ja das ist natürlich richtig, ich hatte darüber auch nachgedacht. Ein kleines Getriebe oder auch eine Hebelübertragung könnte den nötigen Weg am Poti ergeben. Aber ich fürchtete halt zusätzliches Spiel und Fehlerquellen  . Albtraum war ein Hystereseproblem, bei dem der Antrieb immer auf und ab und auf und ab gependelt hätte. Aber das tut er nicht. Die Wiederholgenauigkeit ist gut, die Endpositionen werden zuverlässig angesteuert. . Albtraum war ein Hystereseproblem, bei dem der Antrieb immer auf und ab und auf und ab gependelt hätte. Aber das tut er nicht. Die Wiederholgenauigkeit ist gut, die Endpositionen werden zuverlässig angesteuert.
Das Problem mit dem Schieber ergibt sich ja auch daraus, das der Schieber Grundweg und Trimweg in einem abdeckt. Jeder der den Stellweg eines Servos an einem Kreuzknüppel mit dem am Linearschieber verglichen hat, kennt denn Effekt, der auch ganz praktisch sein kann, hier aber kontraproduktiv.
Wie gesagt, Leute mit einer Computerfernsteuerung lächeln mild, programmieren Stellwege und Linearität neu und sind zufrieden.  Ich würde heute auch lieber schlichte Drehpotis in der Funke bevorzugen. Ich würde heute auch lieber schlichte Drehpotis in der Funke bevorzugen.
Vossi, danke, die Rubrik Bauberichte gab es noch nicht, als ich den Mausbau startete
--
cu
Olaf (der Radfahrer)
|
|
|
|
|
|
25.06.2007, 14:44 Uhr
halbkette
|
Hallo Olaf,
wenn du trotzdem - oder aus Angst vor noch mehr Fehlern - mit deiner Einschränkung zufrieden bist, werde ich meinen Vorschlag zurückziehen und "weiter milde lächeln".
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
|
|
|
|
08.10.2007, 13:09 Uhr
Radfahrer
|
Hallo Mäuslebesucher!
Heut wieder, wie üblich nach großem Leerlauf, einige Neuigkeiten von meiner Maus.
Nachdem die Antriebe im Sommer 2005 zwar funktionierten und sich das Modell auch mehr oder weniger bewegte, aber oft Defekte auftraten, entschloß ich mich zum erneuten Umbau. Auch unter Mitwirkung von WeCoHes Ingenieuren ging ich mehrere Varianten durch. Von einem kompletten Eigenbau-Getriebe auf Stirnradbasis, über Planetenantriebe bis hin zu Modifikationen der vorhandenen Lösung. Nach gründlicher Abwägung habe ich mich für den Neubau in Anlehnung an das bisherige Design entschlossen. Ich kann die vorhandenen Lagerstellen weiter verwenden, die Dichtigkeit bleibt erhalten. Die aufgetretenen Schwierigkeiten werden systematisch abgestellt:
- Die Getriebemotoren vom bisherigen Typ: Superkräftig, stromökonomisch und robust. Aber laut und mit einem Restrisiko des Getriebedefektes (0,5er Modul Zahnräder). Lösung dafür: Die Untersetzung wird zum Teil in den Winkeltrieb (bisher 1:1) verlegt. Entlastet den Getriebemotor. Zudem werden Truckmotoren eingesetzt, die von Haus aus niedertouriger laufen und mit einem weniger hoch untersetzten Getriebe gefahren werden können.
- Die Winkeltriebe alter Auslegung: Reine 1:1 "UmDieEcke" Lösung in Kunststoff. Sollten die Getriebemotoren mittels Selbstaufopferung vor Schäden schützen. Taten sie auch, waren aber zu oft kaputt. Die neue Lösung ist eine 2:1 Untersetzung mit Stahl-Zahnrädern. Dies schafft mehr Stabilität und erzeugt das Drehmoment erst dort, wo es gebraucht wird.
- Die Zahnriemen der alten Variante: Wesentlich zu grobteilige Riemen. Sollten bei Feuchtigkeitseintritt nicht rosten und ohne Kunststoffgefährdende Schmierung auskommen. Brauchten zuviel Vorspannung und rissen dann zum Schluß auch. Nun kommen Rollenketten zum Einsatz.
Basis sind die neuen Getriebemotore. Ich verwende Carson Truck-Motoren für 12V, bezogen über AFV. Die drehen etwa 6500 Touren und liefern ein knapp 3x höheres Drehmoment als die MFA Hochtourer. Unter Berücksichtigung der nachgeschalteten 2:1 Kegelradstufe benötigte ich Getriebe mit ca 30:1 Auslegung. Die gibt es bei MFA nur mit den kleinen RB 35 Motörchen. Diese sind preisgünstig, was bei einem eventuellen Getriebedefekt wohltuend auf den Geldbeutel wirkt.
Für die Verbindung stellte ich eigene Motorhalter her. Diese ersetzen die relativ schmalbrüstigen Metallwinkel der MFA Getriebemotore und gleichen auch das längere Motorritzel aus.
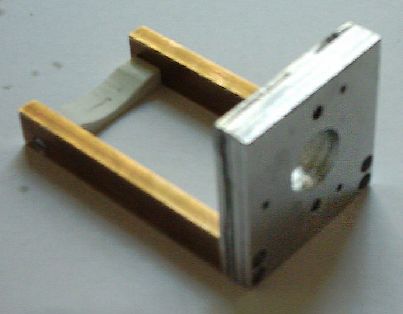 Die Motorplatte ist eine Sandwichkonstruktion aus vier Lagen 2mm Alublech. Die Ausleger sind aus Messing, die Querabstützung aus Polistyrol. Die Motorplatte ist eine Sandwichkonstruktion aus vier Lagen 2mm Alublech. Die Ausleger sind aus Messing, die Querabstützung aus Polistyrol.

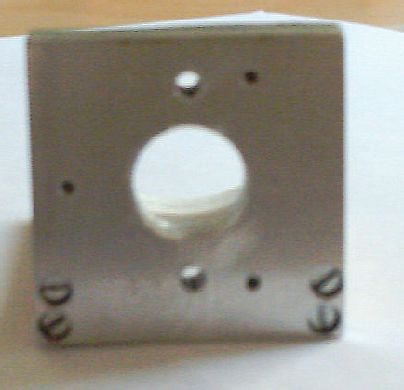 Alle teile werden mit M2 Schrauben verbunden. Alle teile werden mit M2 Schrauben verbunden.
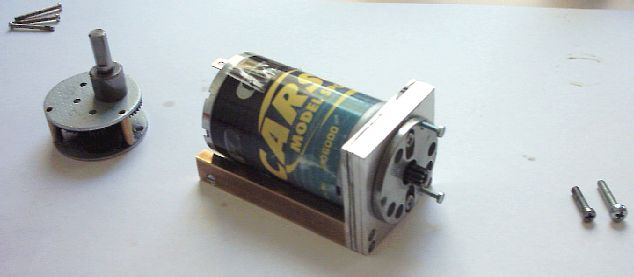 Das Motorritzel 10Z M0,5 bezog ich ebenfalls von Conrad. Die Zinkkappen der RB 35 Getriebe werden anderweitig verwendet, diese Getriebe bekommen die roten Abdeckkappen, die dafür 5mm gestutzt werden müssen. Auch die Schrauben für den Motor und die Getriebemontageplatte mußte ich modifizieren. Das Motorritzel 10Z M0,5 bezog ich ebenfalls von Conrad. Die Zinkkappen der RB 35 Getriebe werden anderweitig verwendet, diese Getriebe bekommen die roten Abdeckkappen, die dafür 5mm gestutzt werden müssen. Auch die Schrauben für den Motor und die Getriebemontageplatte mußte ich modifizieren.
 So schaut alles zusammen aus. Die RB35 Getriebe haben ein Kunststoff-Zahnrad als Eingangsstufe. Die Metallversion der größeren Brüder würde aber ebenso passen. So schaut alles zusammen aus. Die RB35 Getriebe haben ein Kunststoff-Zahnrad als Eingangsstufe. Die Metallversion der größeren Brüder würde aber ebenso passen.
Einen Fehler habe ich bei der Konstruktion gemacht. Die Montageausleger des Motorträgers haben nicht denselben Abstand wie die Löcher in der Montageplatte der alten Motoren. Ich werde neue Löcher bohren müssen.
--
Kein Platz für
Schnick und Schnack!
Olaf (der Radfahrer)
|
|
|
|
|
|
29.06.2008, 16:58 Uhr
Radfahrer
|
Hallo Mäusefänger!
In gewohnter Gemächlichkeit geht es mit meinem Langzeit-Projekt weiter.
Da der Samstag verregnet war und nichts wichtigeres anstand, habe ich den verhassten Winkeltrieb weiter befummelt.
Die alte Version arbeitete mit Kunststoff-Kegelrädern in 1:1. Sie sollten sich quasi "opfern" wenn größere Blockaden drohten die Getriebe zu beschädigen. Leider trat dieser Fall recht oft ein. Mein neues Konzept sieht nun Räder aus Stahl vor. Diese ermöglichen zudem eine Untersetzung von 2:1, so daß das eigentliche Motorgetriebe nur noch die halbe Endlast bewältigen muß.

Der alte Winkeltrieb krankte zudem anfangs daran, daß die 6 mm-Stahl Querwelle sich unter Last ebenso verformte wie die Motorhalterung mit dem Ritzel der Last auswich. Auch das beschleunigte, durch das falsche Flankenspiel, den Verschleiß.
Im neuen Antrieb habe ich sowohl einen stabilieren Motorträger, als auch zusätzliche Abstützungen mittels PS-Platten und Kugellagern. Nun sollten die Kegelräder nicht mehr unkontrolliert rumkegeln können.

Ein schön großes Kugellager mit Bundfeder ermöglicht, das getriebene Kegelrad am Schaft zu fassen.
Da die Quertriebswellen nun dreifach gelagert sind, sind die Längsabstützungen die wohl genauesten Teile, die ich je gefertigt habe. Kleinste Abweichungen verursachen hier Schwergängigkeit durch Fluchtungsfehler. Ich habe also zuerst das Loch gefertigt, sägen und schleifen da ich keinen Topfbohrer habe, und erst danach mit viel Anpassproben die Planflächen. Im Hintergrund sieht man die Reste der "PS-Schlacht".
Nun noch Dasselbe für die rechte Seite und ich kann mich an die Antriebsketten wagen.
--
Kein Platz für
Schnick und Schnack!
Olaf (der Radfahrer)
|
|
|
|
|
|
29.06.2008, 17:21 Uhr
SLT50-2
Der Dachsmaster

|
Hallo Olav,
freut mich ,daß es mit der Maus weitergeht.
Der Antrieb mit den 3 fach gelagerten Antriebswellen sieht richtig gut aus und sollte nun auch stabil genug sein.
Einzig bei den Motoren würde ich am hinteren Ende evtl. noch einen Halter dazusetzen damit sich auch hier nichts wegdrücken kann.
Alles in Allem rundum klasse Arbeit ,die mir Appetit auf die weiteren Fortschritte macht.
Gruß
Michael
|
|
|
|
|
|
29.06.2008, 17:37 Uhr
Radfahrer
|
Hallo Dachser!
Der Motor liegt hinten auf einer PS-Querstrebe auf. In der Art hatte ich auch schon die erste Version verstärkt. Ich hatte mir gedacht, das würde bei Vibrationen nicht ganz so scheppern wie Metall auf Metall.
Theoretisch könnte er jetzt also noch axial nach hinten ausweichen. Ich hoffe, Theo weiß das nicht. . Eigentlich sollte sich das Kegelrad auf der Getriebewelle über ein eigenes Kugellager an der Querwand abstützen. Gegendrehmoment am Getriebemotor sollte das 8 mm Sandwichpack aufnehmen. Ich ärgere mich etwas wegen dem Konstruktionsmangel von oben, weil größere Stützweite da nützlich gewesen wäre.
--
Kein Platz für
Schnick und Schnack!
Olaf (der Radfahrer)
|
|
|
|
|
|
02.07.2008, 11:26 Uhr
Tacki
Der Poly-Schnitzer-Kalif von Berlin

|
Kein Platz für Schnick und Schnack,
Farbe druff und fertig 
Mfg. Tacki
|
|
|
|
|
|