01.01.2016, 20:37 Uhr
  Relais Relais

|
Allen Lesern u. angeschlossenen Stationen "Ein Gesundes Neues Jahr "
Hallo Kay um eine Maßstabsgerechte Vmax mit Deinen Modell zu fahren welche dann 40 kmh entsrechen würde müstest Du
1.38m /sek. zurücklegen .
meistens ist das aber auf Grund der enormen Motoriesierung eine Geschwindigkeit von viel höherer gegeben .
z.B. 1:1 = 60 kmh bei 1:6 = 10 kmh sind bei mir 2.77 m/s . Bei größer als Maßstab 1 : 8 geht das schon aber alles darunter
1 :10 ,1 :16 , 1 : 35 und vieleicht noch kleiner müste das weg -Zeit Verhältnis schon etwas angepasst sein.
Gruße , B.
|
|

|
|
|
02.02.2016, 21:36 Uhr
Kay1979
|
Hallo zusammen,
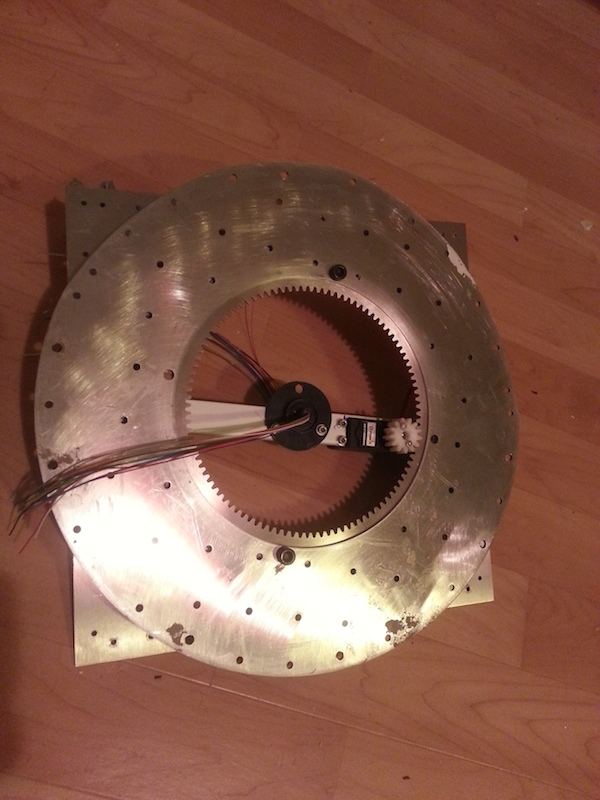
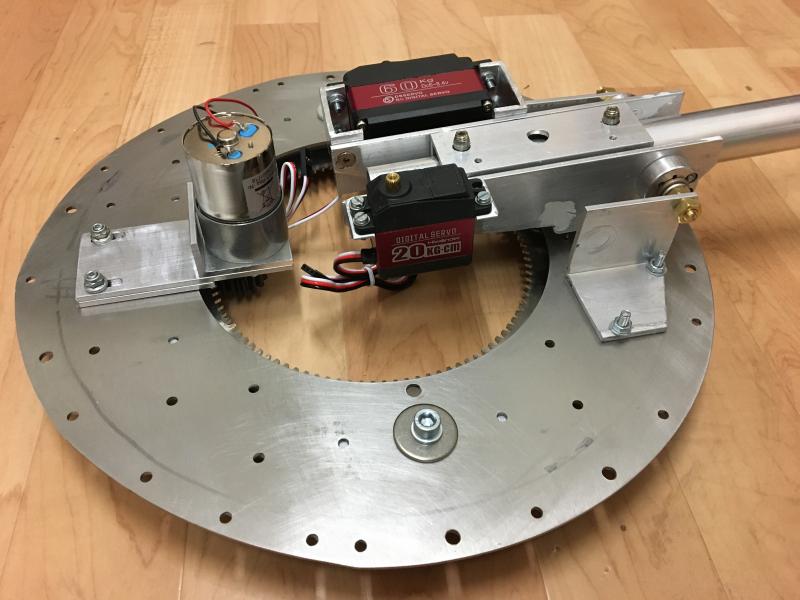
hier ein Bild vom Turmantrieb, das übernimmt ein umgebauter D-Power Servo. Die AFV Drehdurchführung hat auch ihren Platz gefunden.
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
|
|
|
|
06.12.2020, 22:38 Uhr
Kay1979
|
Eine ganze Ecke Zeit ist vergangen, ab und zu konnte ich auch etwas weiter bauen. Der Turmantrieb ist jedenfalls aus der Wanne in den Turm gewandert.
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
|
|
|
|
06.12.2020, 23:02 Uhr
Leopold1A4

|
Toll daß es hier weitergeht.
Und: top Metall-Arbeiten. gefällt mir sehr gut
--
_______________
Grüsse
Herbert
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von Leopold1A4 am 12.12.2020 13:36.
|
|
|
11.12.2020, 23:12 Uhr
Kay1979
|
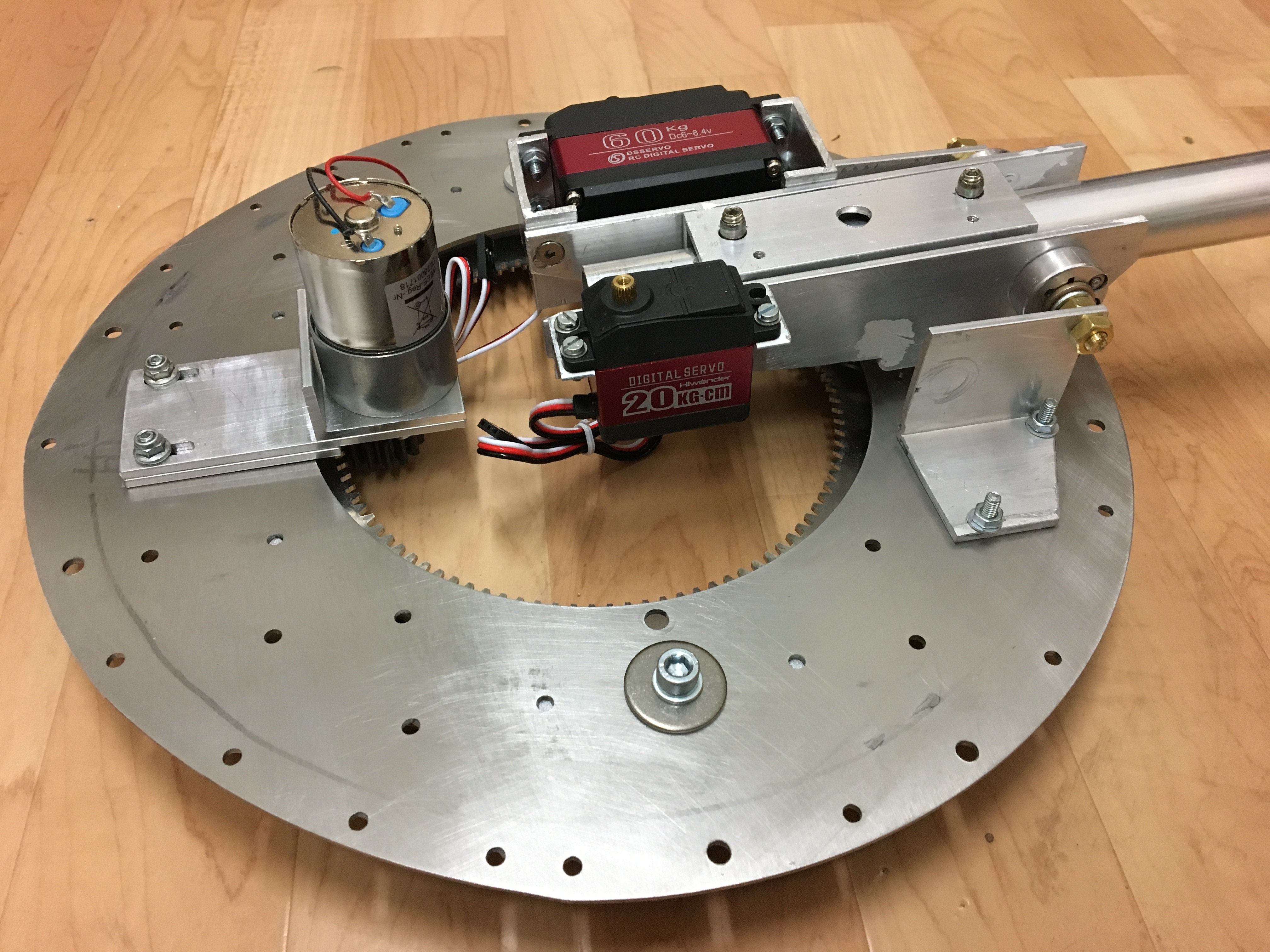
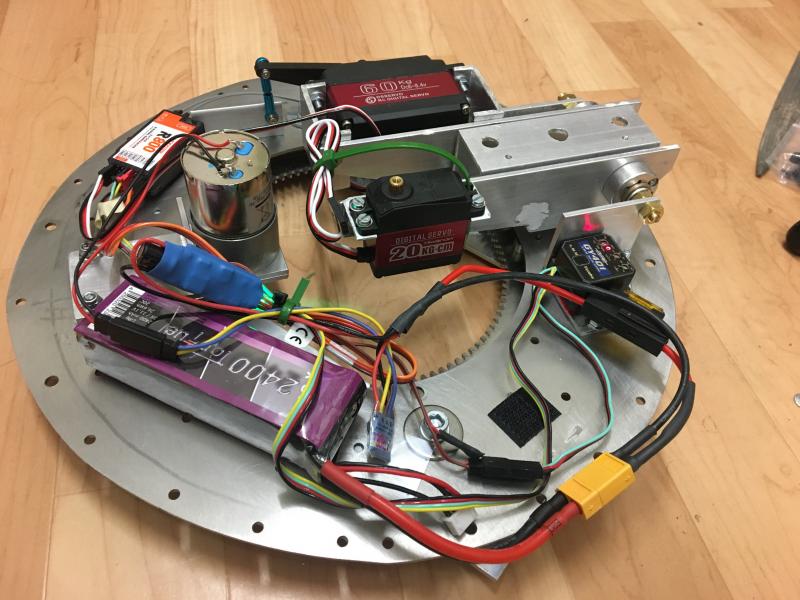
Hallo Herbert, das, das so gut aussieht, ist anhand CAD gelasert worden. Der Rest ist alles Baumarktware, mit relativ einfachen Werkzeug und Maschinenausstattung erzeugt. Aber auf jeden Fall danke für das Lob.
Hier mit Elektronik. Die Richtungsstabilisierung funktioniert erstaunlich gut. Für die Höhenstabilisierung habe ich vor, etwas per Arduino o.ä. selbst zu programmieren.
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
|
|
|
|
12.12.2020, 07:43 Uhr
jhamm

|
quote:
Original von Kay1979:
Für die Höhenstabilisierung habe ich vor, etwas per Arduino o.ä. selbst zu programmieren.
--
Grüße, Kay
Moin Kay,
da gibt es das Projekt " StabiWii => StabiWii - GoogleDrive
Es wird ein Arduino Pro Mini verwendet:

Für jemanden der mit einem Lötkolben umgehen kann ein sehr einfache Aufgabe...
--
Grüße
Jürgen
|
|
|
|
|
|
12.12.2020, 08:55 Uhr
Zugfunker

|
quote:
Original von jhamm:
quote:
Original von Kay1979:
Für die Höhenstabilisierung habe ich vor, etwas per Arduino o.ä. selbst zu programmieren.
--
Grüße, Kay
Moin Kay,
da gibt es das Projekt " StabiWii => StabiWii - GoogleDrive
Es wird ein Arduino Pro Mini verwendet:
Für jemanden der mit einem Lötkolben umgehen kann ein sehr einfache Aufgabe...
--
Grüße
Jürgen
Kleine Ergänzung:
Das Projekt wurde auch hier im Forum schon einmal vorgestellt und behandelt:
Stabilisierung
--
-- Stefan --
|
|
|
|
|
|
18.01.2021, 22:20 Uhr
Kay1979
|
Hallo Stefan,
vielen Dank für den Link. Aus Spaß an der Freude hab ich trotzdem selber gebastelt und programmiert.
Ein Arduino Nano fragt zwei Kanäle des Empfängers ab und steuert den Höhenrichtservo.
Man kann zwischen "keine Korrektur" und "Höhen- und Seitenkorrektur" umschalten.
Die Seitenkorrektur übernimmt einfach ein Gyro, der von einem nicht mehr flugfähigen  Hubschrauber stammt. Die Höhenkorrektur nimmt die Werte eines Beschleunigungssensors zur Hilfe, der auch vom Nano ausgelesen wird. Hubschrauber stammt. Die Höhenkorrektur nimmt die Werte eines Beschleunigungssensors zur Hilfe, der auch vom Nano ausgelesen wird.
Als Herausfordernd hat sich einmal das Signal vom Beschleunigungssensor erwiesen, dass sich während der Fahrt, vor allem beim Anfahren, mit starken Überschwingen meldet. Etwas Mittelung und Messwertbegrenzung hat da geholfen.
Außerdem scheint das Signal vom Empfänger nicht ganz sauber, der Nano erkennt ab und zu Änderungen im PWM Signal, die unerwünscht sind. Auch hier gibt es Softwareabhilfe, die eine Änderung des PWM Signals nur an den Servo weitergibt, wenn sie lang genug sind. Einzelne Ausreißer werden ignoriert.
Sonst erkennt die Software noch den Regelbereich der Höhenrichtung und verhindert, dass die Korrektur in einen mechanischen Anschlag gerät.
Es funktioniert ganz passabel, ein paar Ideen hätte ich noch. Z.B. das der Controller die genaue Turmposition kennt, und verhindert, das die Kanone an der Wanne oder Anbauteilen anschlägt, noch mehr Sensoren, um die Positioniergenauigkeit zu verbessern ... allerdings soll es auch nicht Overengineered werden.
Was ich noch in den Schaltkanal einprogrammieren werde ist eine Impulserkennung, um damit dann die Funktion für die Schußauslösung (Rückzug und Bewegung der Auswurfklappe für den Hülsenboden) aktivieren zu können. Da ich nur einen 6 Kanal Sender habe, werde ich das da mit unter bringen. Dann sollte der Speicher vom Nano immer noch nicht voll sein, mal sehen was ich mir dann noch überlegen kann.
Nachdem die Grobmechanik jetzt erstmal steht - ein paar Verbesserungen hab ich noch vor, aber - es fährt, Turm dreht, Kanone hebt und senkt sich - will ich jetzt erstmal was an der Optik weiter machen.
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
|
|
|
|
18.01.2021, 23:52 Uhr
Oldchap

|
Hallo Kay,
das klingt, als hättest Du das Stabi-Problem mit Bravour gelöst! Das wird etliche Kollegen interessieren, denke ich.
--
Viele Grüße
Gerhard
_________________________
Bigtanks-Köti 1:6, Hermann-Porsche-Köti 1:6, Bigtanks-Jati 1:6, Armortek-Japa 1:6, Spearhead Pz. IV 1:6
|
|
|
|
|
|
19.01.2021, 07:41 Uhr
jhamm
|
Moin Kay,
ich will Deine Leistung nicht schmälern, zumal ich selber auch noch kein Arduino-Projekt erstellt habe.
Alle von Dir genannten Punkte sind beim StabiWII-Projekt sauber umgesetzt.
Dort hat man alternativ Summmensignal oder SBus-Anschaltung und die Empfindlichkeit des Gyros lässt sich stufenlos anpassen, genauso wie die Laufrichtung und der Bewegungsbereich der Servos.
Man hat auch Zusatzfunktionen wir Heckabweiser, Rauchpumpe, Rohrrückzug usw.
Ich stimme Gerhard zu und würde mich freuen, wenn Du Deine Lösung im Detail vorstellen könntest.
--
Grüße
Jürgen
|
|
|
|
|
|
19.01.2021, 12:21 Uhr
Kay1979
|
Hallo Jürgen und Gerhard,
danke für eure Nachrichten. Vielleicht noch zur Erklärung: Ich habe ganz bewusst das Stabi-Projekt bisher nicht angeschaut, weil ich erstmal sehen wollte, was ich selbst von Grund auf zusammen bekomme.
Ausgereift ist es keinesfalls, aber ich habe einige Hürden erkannt, die ich vorher nicht erwartet habe, und habe meine Lösungen dafür gefunden (auch Schaltungstechnisch). Mit diesen Erfahrungen wäre für mich jetzt der Zeitpunkt, mir das Stabi Projekt auch anzusehen und hoffentlich auch verstehen zu können und dann auch an meine Voraussetzungen anpassen zu können.
Dann werfe ich mein eigenes Programm vielleicht über Bord, gelernt hab ich auf jeden Fall etwas.
Ich werde berichten ...
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
|
|
|
|
24.01.2021, 22:35 Uhr
Kay1979
|
Servus,
nach einigen Umverdrahten habe ich die StabiWii (die Nanoimplementierung) getestet. Ich denke jede Stabilisierung ist nur so gut, wie die zugrunde liegende Hardware (Sensor, Lagerung der Kanone, Leichtgängigkeit, etc.). Auch mit der Lösung zeigte mein Modell die schon benannten Schwierigkeiten, wie Überschwingen der Korrektur beim Anfahren/Anhalten.
Der Quellcode von der Software ist auch extrem mächtig, man sieht die Erfahrung dahinter und den Wunsch, vielen Modellbauern und deren Varianten an Hardware gerecht zu werden. Bin beeindruckt, auch da ich selbst solche Applikationen bisher nicht im Detail angeschaut habe.
Von daher hab ich an meiner eigenen Lösung weiter programmiert, die ich später hier vorstellen werde (da die Höhenrichtfunktion inzwischen so funktioniert, dass ich erstmal zufrieden bin). Für mich ist das einfacher, da ich weiß, wie ich was umgesetzt habe, und die Komplexität natürlich um Größenordnungen kleiner ist: Nur eine zu/abschaltbare Höhenrichtfunktion bisher. Die Seitenrichtfunktion übernimmt, wie schon geschrieben, ein Gyro aus dem Helibereich, der zwischen dem Empfänger und der Motorsteuerung geschaltet ist, und mit dem selben Kanal wie die Höhenrichtung in den Heading Hold Modus geschaltet wird. Damit werte ich nur einen Beschleunigungskanal aus (Wert der Erdbeschleunigung), und muss mir keine Gedanken über den Raumvektor, den Gyroskopdaten und der Ansteuerung der Turmdrehung machen - geschweige denn Verdrillschutz und was weiß ich alles. Auch kann ich alle Parameter am Rechner direkt am Modell einstellen, und brauche keine Nutzerfreundlichkeit und einstellbare Variablen, wie sie das StabiWii Projekt bietet.
Als nächstes möchte ich also erstmal den Programmcode aufräumen, und meine Lösung und die Hardware/Beschaltung hier vorstellen. Im Anschluss kommt der Rohrrückzug + Hülsenbodenauswurf und die Turmpositionserkennung (aka Heckabweiser).
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
|
|
|
|
27.01.2021, 23:11 Uhr
Kay1979
|
Servus,
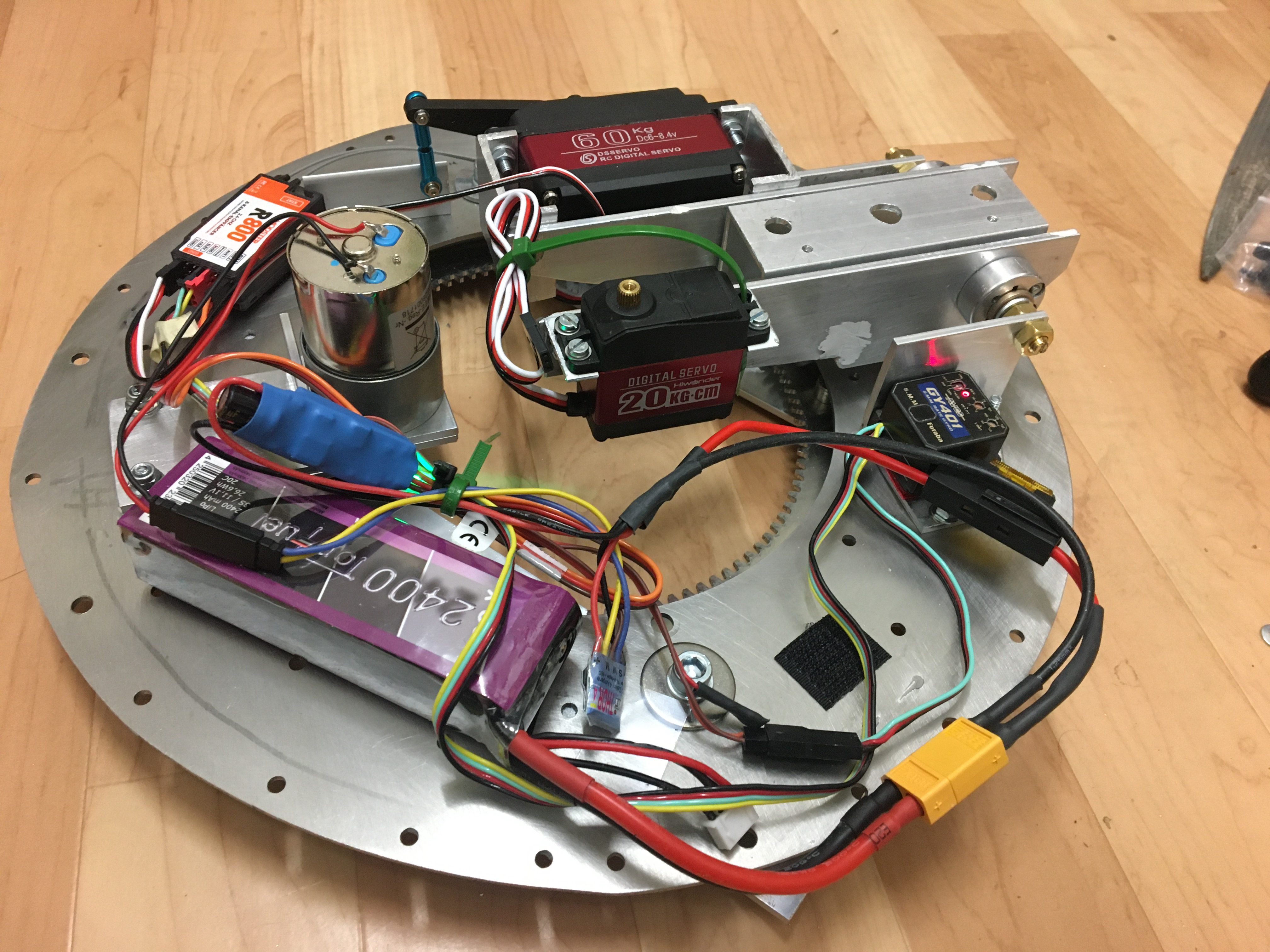
hier die versprochenen technischen Details. Als Empfänger kommt ein Modster R800 zum Einsatz. Der Spannungsregler BEC 10A 25V stellt eine Spannung von 6.8V zur Verfügung. Als Höhenrichtservo kommt ein 25kg Servo in Standardmaßen zum Einsatz - für den auch die Spannung. Weiterhin der Arduino mit einem zusätzlichen MPU6050 Beschleunigungssensor/Drehratensensor. Der Turmdrehregler ist ein Thor4.
All diese Teile sind mit der 6.8V Versorgung kompatibel.
Zu der Software: Die zwei Interruptpins des Arduino werden mit Kreiselempfindlichkeit und an Throttle des Empfängers angeschlossen. Die Auswertung des PWM Signals erfolgt dadurch per Interruptsteuerung, ohne die Programmschleife zu blockieren. Der Modster müsste eigentlich auch das PPM Signal bereitstellen, aber das konnte ich nicht dekodieren.
Das erkannte PWM Signal ist nicht 100% stabil. Damit eventuelle Störungen weder die manuelle Höhenrichtung noch die Stabilisierung stören, werden Änderungen im PWM Signal erst akzeptiert, wenn sie mehrfach delektiert werden, und sie werden nur zu gewichtet übernommen. Das hat sich als besser funktionierend herausgestellt wie ein gleitender Mittelwert.
Beim Signal des Beschleunigungssensor ist es ähnlich. Es ist sehr störanfällig gegen ruckartige Bewegungen, die vor allem beim Anfahren und Anhalten, oder wenn das Modell über eine Schwelle kippt, auftreten. Hier wird zum einen das Signal auf einen der Anwendung entsprechenden limitiert, Spitzen die durch ruckartige Bewegungen kommen, werden damit abgeschnitten. Zusätzlich wird der neue Winkel auch nur gewichtet übernommen, das glättet Unregelmäßigkeiten nochmal ab. Auch hier funktioniert das besser (da schneller) als ein gleitender Mittelwert.
Das Korrektursignal wird so berechnet, dass es bei großer Abweichung auch größer wird, um bei großer Abweichung schneller zu regeln, bei kleinen Abweichungen dann langsamer und damit genauer. Außerdem wird das Korrektursignal auf die maximale/minimale Servoauslenkung aus dem manuellen Modus begrenzt, damit die Korrektur nicht eingestellte Limits/mechanischen Grenzen überschreitet.
Im Stabilisierungsmodus kann man die Höhenrichtung manuell ändern. Das ist auch mit diversen Verzögerungen programmiert. Bevor der neue "Zielwinkel" in die Stabilisierung übernommen wird, muss das Ende der manuell getriggerten Bewegung abgewartet werden. Solange ist die Stabilisierung auch inaktiv. Ansonsten kam es zu sichtbaren Überkorrekturen und einem Einschwingen der Korrektur, das ist inzwischen quasi nicht mehr sichtbar.
Im Programm mit Wartezeiten zu spielen und immer wieder eine Probefahrt zu machen, hat viel Zeit gekostet. Generell die Feinabstimmung zwischen schneller Korrektur, die dann zu Überschwingen neigt, und langsamer Korrektur, die immer hinterher hinkt, ist ein zu findender Kompromiss.
Nicht zu vergessen, der Beschleunigungssensor wurde inzwischen so nah wie möglich am "Schildzapfen" der Kanone angebracht. Das verringert die Rauscheinkopplung zusätzlich, viel besser als die anfängliche Position am Ende der Quasi-Wippe.
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von Kay1979 am 28.01.2021 08:43.
|
|
|
13.02.2021, 20:50 Uhr
Kay1979
|
Servus,
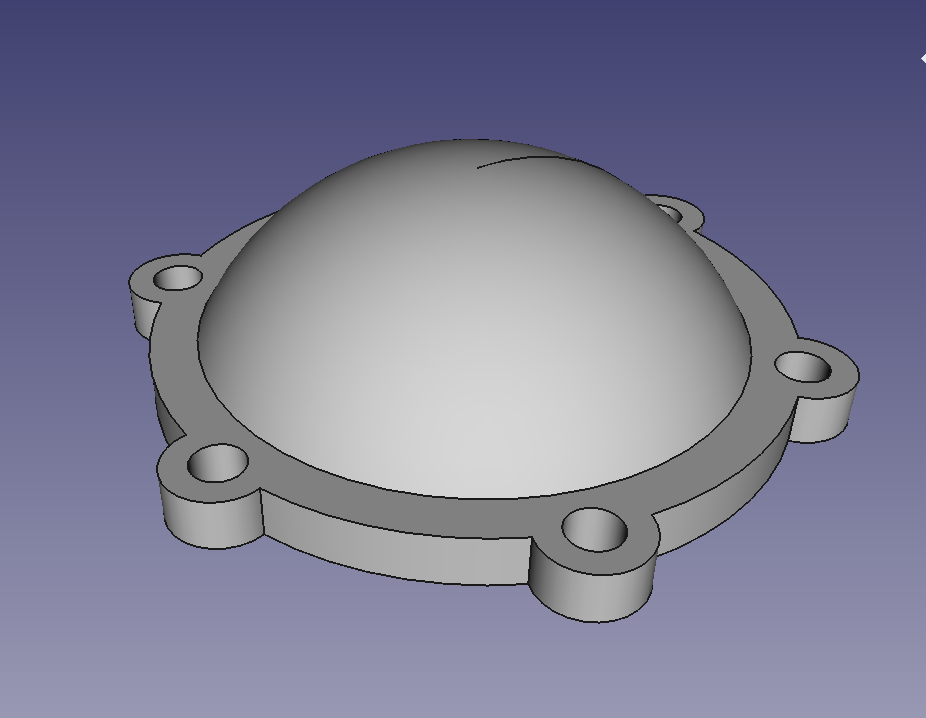
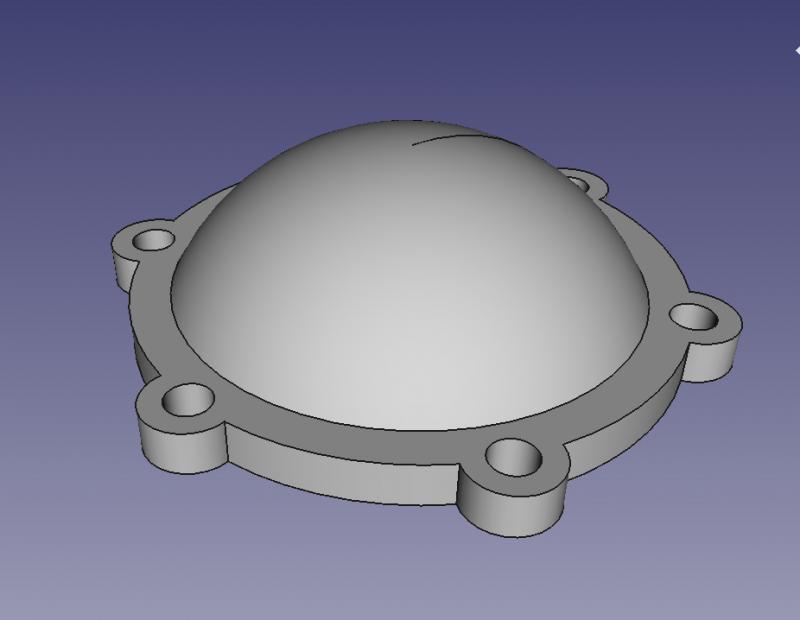
das mit dem Programmieren geht weiter, besser gesagt die Arbeit am Computer. Ich hab mir als nächste Baustelle die Optik der Laufrollen ausgesucht. Für die Abdeckkappe habe ich mich mit Freecad versucht, nach ein paar Stunden sind wir dann auch Freunde geworden. Hier die Kappe die ich jetzt drucken lasse, mal sehen was dabei raus kommt.
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
|
|
|
|
13.02.2021, 20:51 Uhr
Kay1979
|
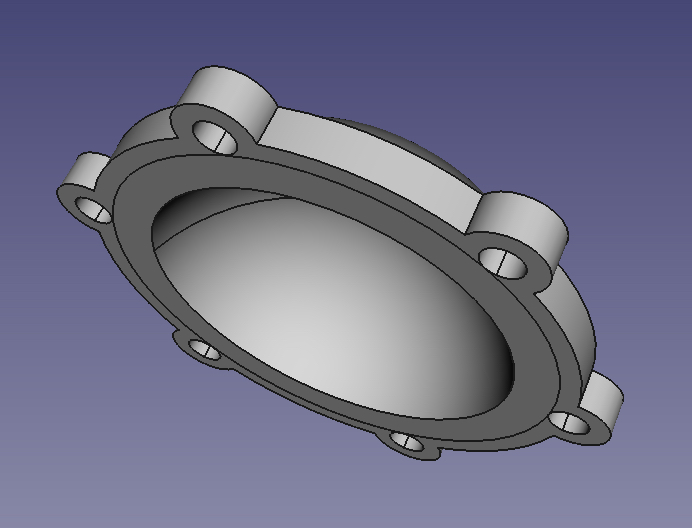
Noch eines. Ich hoffe, nächste Woche das Ergebnis in den Händen halten zu können.
--
Grüße, Kay
Nur nicht beirren lassen.
|
|
|
|
|
|