13.04.2008, 03:13 Uhr
  halbkette halbkette

|
Hallo Stephan,
ich hoffe doch, dass dir mein Interesse nicht unangenehm ist. Eigentlich dachte ich, dass du Hilfe brauchst.
Übrigens bin ich öfters nachts unterwegs im Netz, das ist für mich nicht ungewöhnlich.
Danke für das Bild und die nähere Beschreibung - jetzt sehe ich einiges klarer.
Dein Getriebe ist also doch symmetrisch aufgebaut und es sieht auch einigermaßen kräftig aus, soweit man das von hier aus erkennen kann. Die Kunststoffräder können selbst an der Stelle offensichtlich diese Leistung nicht mehr übertragen - nimm wenigstens Messing dafür. Das ganze Getriebe wird schon laut genug laufen, dagegen helfen auch zwei Kunststoff-Zahnräder alleine nicht. Ich benutze diesmal schrägverzahnte Zahnräder gegen das unangenehme Getriebegeräusch. Das ist aber bei so einem umfangreichen Getriebe wie deins schon ein Kostenfaktor und will gut überlegt sein.
Zu dem Typenschild deines Motors kann ich mich leider nicht zurückhalten: da steht ein ziemlicher Unsinn drauf. Ich meine natürlich die Angabe von "70W Output". Dabei dreht sich der alte Ohm, der uns das "Ohmsche Gesetz" beschert hat, im Grabe um.
Beweis:
Du hast selbst schon festgestellt, dass die aufgenommene Leistung lt.Angabe 600 Watt betragen muß.
Nun ist es so, dass die abgegebene Leistung zwar kleiner als dieser Wert sein muß, weil die elektrischen und mechanischen Verluste abgerechnet werden, aber derart klein ( 70 W ) kann sie niemals sein. Durchschnittlich beträgt die Verlustleistung bei einem E-Motor um die 25-30 % !
Das heißt, dass dein Motor eine Leistungsabgabe von rund 450 Watt haben muß. Vielleicht ist beim Druck des Schildes eine "4" vor der 70 vergessen worden.
Damit liegst du mit der Motorisierung deines schweren Modells ziemlich genau da, wo ich es mindestens erwartet habe ( s. weiter oben ).
Mit 70 Watt hättest du kaum einen Schritt im Gelände fahren können.
Apropos fahren:
15m/min sind ja nicht gerade realitätsnahe Zahlen für einen KT. Der war zwar stark untermotorisiert mit seinen 70 Tonnen, soll aber 35-38 km/h auf der Straße erreicht haben. Dein Modell sollte dann umgerechnet auf 1:8 wenigstens eine passende Endgeschwindigkeit von ( um bei deiner Angabe zu bleiben ) 70(!) m/min oder anders: 1,2m/sec fahren können. Dazu sollte natürlich das Getriebe angepaßt werden.
Dazu sollte dein Antriebskettenrad dann etwa 230 U/min bzw. 3,8 U/sec machen.
Mit dem Langsamläufer-Motor hättest du dann nur eine Untersetzung von etwa 1:2,5 benötigt. Da muß der Motor selbst aber schon ein gewaltiges(?) Drehmoment entwickeln, denn aus dem Getriebe ist dann mangels Untersetzung kaum noch das nötige Drehmoment herauszuholen.
Da müßte ein anderer Motor her, mit gleichen Leistungsdaten, aber einer Nenndrehzahl von etwa 3000 - 4000 U/min - wie sonst üblich. Damit klappt dann alles viel besser.

--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
 Beitrag 1 mal editiert. Zuletzt editiert von halbkette am 13.04.2008 03:15. Beitrag 1 mal editiert. Zuletzt editiert von halbkette am 13.04.2008 03:15.
|
|
|
13.04.2008, 10:35 Uhr
rebam

|
Könnte es evtl sein,daß 20V/5,7A die Nennwerte sind und 30A der Kurzschlussstrom mit dem höchsten anliegenden Drehmoment 
quote:
Original von Tigerlilli:
...
Die max. Geschwindigkeit die ich mit dem dicken Motor mal gestoppt hatte lag bei ca 15m/min. Das ist eigentlich i.o.
...
Das wäre doch ne Gesamtübersetzung von ca 12.
Wenn ich richtig gerechnet habe (70W,20V, 580rpm),dann hast du nach dem Getriebe 13,8Nm anliegen. Mit dem Zahnkranz als Hebelarm eine Kraft von 276N. Das finde ich beachtlich. Bei 24V noch besser.
Besser war das Verhältnis von Gewichtskraft zu Vortrieb beim Original sicherlich auch nicht.
 Tino Tino
--
ANOTHER ONE BITES THE DUST
|
|
| Beitrag 3 mal editiert. Zuletzt editiert von rebam am 13.04.2008 11:00.
|
|
|
13.04.2008, 12:42 Uhr
Tigerlilli
|
Hallo Zusammen
ich bin über die Tipps natürlich sehr Dankbar, hätte besser vorher mal nachgefragt dann währe mir der jetztige Ärger wohl erspart geblieben.
Die Berechnungen zur Endgeschwindigkeit waren bei mir ähnlich.
ich bin von 35Kmh ausgegangen das sind 73m/min .Ca 150 umdr. müsste das Kettenrad machen
da 5umdr 2,6m Fahrstrecke sind.
Da ich aber keine Überführungsfahrten über die Autobahn machen will und damals auch keinen passenden Motor hatte schien die Geschwindigheit fürs Gelände passend.
Mitlerweile habe ich einen Motor mit den Angaben 24V sonst nix!
Die Drehzahl habe ich im Betrieb messen lassen. Da kamen ca 2200 1/min raus. Leistung keine Ahmung.
Die Anschlussleitungen haben 1,5 mm was auf einen hohen Strom hindeutet.
Wenn die mechanichen Änderungen gemacht sind baue ich den mal ein.
Probieren geht über studieren
An rebam noch die Frage:
mit welcher Formel hast du das Drehmoment berechnet?
Mein Tabellenbuch gibt nichts her.
Gruß Stephan
|
|
|
|
|
|
13.04.2008, 14:00 Uhr
Matthes

|
Leistung= Drehmoment x Winkelgeschwindigkeit, oder anderstrum:
Drehmoment = Leistung/Winkelgeschwindigkeit.
Wobei Winkelgeschwindigkeit = [Pi X Drehzahl (in 1/min)] / 30
Könnt ich mir vorstellen....
|
|
|
|
|
|
13.04.2008, 15:55 Uhr
halbkette
|
Hallo Stephan,
da gibt es doch offenbar noch einige Mißverständnisse.
Zunächst einmal :
Tino hat natürlich recht : die 30 A sind der maximale verträgliche Strom, wahrscheinlich nur kurzzeitig und der Nennstrom sind natürlich die 5,7 A.
Damit gerechnet kommen allerdings die 70 Watt nur bei einem miesen Wirkungsgrad von 62% heraus.
Das könnte zwar stimmen, nur, so "schlecht" wollte ich von dem Motor gar nicht denken.
Wenn er dann wirklich ein Drehmoment von ca.1,15 Nm an der Motorwelle produziert, ist er zwar brauchbar für den Antrieb, aber dabei leider viel zu langsam für die Modellgeschwindigkeit.
Dann bringt mich deine ( Stephans ) Abtriebsdrehzahl durcheinander:
du hast doch vorher geschrieben, dass das Antriebskettenrad ( für die "Fahrkette" ) einen Durchmesser von 100mm besitzt. Damit erechnen sich aber nicht die Drehzahlen am Abtrieb, die du nennst. Demnach müßte das Antriebskettenrad etwa 165mm Durchmesser haben...( 5 Umdrehungen entsprechen 2,6m )?
Was ist nun richtig?
Der "neue" Motor scheint auf dem richtigen Weg zu sein, obwohl 2200 U/min wahrscheinlich die Leerlaufdrehzahl ist , die dann eigentlich mehr als doppelt so hoch sein könnte. Aber besser ist der allemal.
Kannst du den Strom des Motors nicht messen lassen? Am besten mit einem Meßgerät mit Induktions-Meßzange - Betriebselektriker müßten sowas haben. Diese Geräte können den Strom am laufenden Motor messen, ohne die Kabel vorher auftrennen zu müssen.
Dann müßte dabei natürlich noch etwas Last simuliert werden, bevor man auf die Nennleistung schließen könnte.
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
|
|
|
|
13.04.2008, 16:52 Uhr
rebam
|
@halbkette,genau die Gedanken, sind mir auch durch den Kopf gegangen,recht langsam für Scale und ein mieser Wirkungsgrad. Aber der Wirkungsgrad von Schneckengetrieben ist ja nur in einem kleinen Bereich akzeptabel.Ansonsten sind um die 80% Wirkungsgrad pro Übersetzungsstufe durch Schneckengetriebe nichts besonderes.
Im Gegensatz dazu werden (bekanntlich) komplette Stirnradgetriebe mit einem Gesamtwirkungsgrad von >90% entworfen.
Kann also schon alles irgendwie hinkommen.
Deshalb habe ich erstmal nur als Vermutung geäußert.
Tino
--
ANOTHER ONE BITES THE DUST
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von rebam am 13.04.2008 16:53.
|
|
|
20.04.2008, 19:18 Uhr
Tigerlilli
|
Hallo hier bin ich wieder
ich glaube das mit dem Getriebe lassen wir vorerst mal ruhen.
Sonst artet das hier noch aus.
Ich werde einige Änderungen machen wie, stärkere Wellen, Keilnuten und Passfedern sowie einen
anderren Motor einbauen.
Wenn das auch nicht klappt, können wir das Thema nocheinmal aufgreifen.
Nochmals vielen Dank für die Tipps.
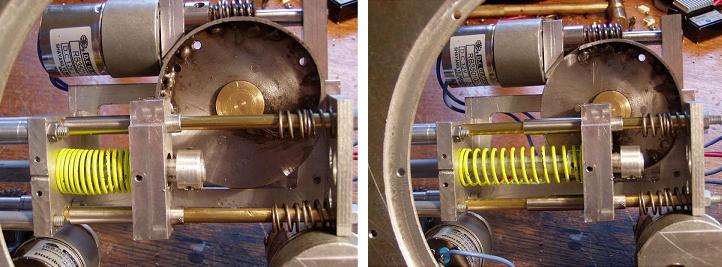
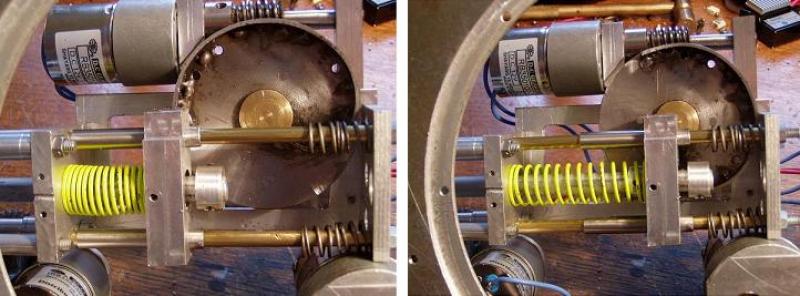
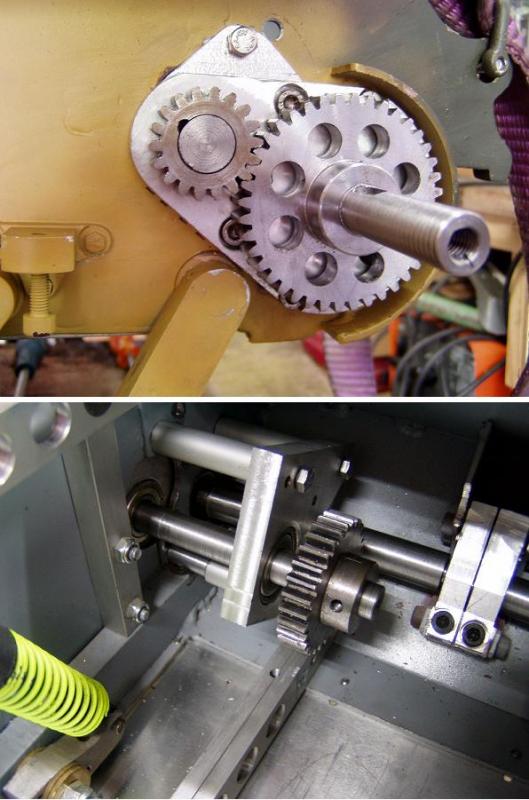
Ich zeige nun mal 2 Bilder von der Rohrrücklauf-Mechanik.
Diese funktioniert nämlich einwandfrei.
Vielleicht regen die Bilder auch zum Nachbau an.
Bis dann
Stephan
|
|
|
|
|
|
20.04.2008, 19:39 Uhr
amy

|
Hallo Stephan
dein Rohrrückzug System scheint interessant zu sein nur leider habe ich nach einigen Minuten betrachtens immer noch nicht herausbekommen wie das Rohr zurück gezogen wird. ich Meine was zieht das Rohr zurück?oben sehe ich ein motor mit schneckenrad aber wie greift dieses das rohr zurück ? vielleicht könntest du das ganze ein wenig genauer Beschreiben . danke gruß Zoran
|
|
|
|
|
|
20.04.2008, 21:21 Uhr
mmg
|
Hallo Zoran,
das Rohr wird, so wie ich das sehe, nicht zurück gezogen, sondern von der gelben Feder zurück gedrückt.
Das Topfrad bildet eine Art Steuerkurve. Wenn Du genau hinschaust, kannst Du sie im ersten Bild, unterhalb der Führungsstange, bei der Anschlagfeder, erkennen.
Meiner Meinung nach, zeigt das erste Bild den Zeitpunkt der Auslösung des Rücklaufes. Vorher wurde der Alublock noch vom "Topfrand" gehalten.
Beim Weiterdrehen des Topfrades schiebt die Steuerkurve das Rohr wieder nach vorne und spannt dabei die gelbe Feder für den nächsten Schuss.
Viele Grüße
Marc, der gerne mal ein Video vom Bewegungsablauf, nicht nur der Mechanik, sondern des gesamten Rohres sehen würde
|
|
|
|
|
|
20.04.2008, 22:08 Uhr
Tigerlilli
|
Hallo Zoran
Eine Beschreibung meinerseits erübrigt sich eigendlich, da Marc die Mechanik schon perfekt
erklärt hat.
Sobalt die Steuerkurve den Alublock freigibt, reißt die Feder das Rohr beim Schuß zurück.
Die Kurvenscheibe dreht sich nun 1mal um 360 grad bis ein Microschalter den Umlauf wieder stopt.
Die Kurve steht dann ca. 1,5- 2mm auf dem Alublock,damit beim nächsten Impuls dieser sofort wieder
freigegeben wird.
Der Ganze Vorgang dauert 9s. Das Rohr ist aber bereits nach 4s wieder in der vorderren Position.
Durch die eliptische Vorm der Kurve bewegt sich das Rohr für die restliche Zeit aber nicht mehr.
Der Rücklaufweg beträgt 50mm.
Ob die 4s realistich sind kann ich nicht beurteilen, es sieht aber gut aus.
Leider habe ich keine Videokammera, den Fotoapperat kann man warscheinlich vergessen aber ich versuchs mal.
Gruß Stephan
|
|
|
|
|
|
21.04.2008, 01:29 Uhr
mmg
|
Hallo Zoran.
schön gemacht, Deine Mechanik.
Nur die 4s kommen absolut nicht hin. Schau mal in Youtube. Da sind einige Videos drin, in denen Tiger schießen. Der ganze Vorgang, Rohrrücklauf und vorholen, dauert ca. 1s.
Ggf. kannst Du da mit einem kleineren Zahnrad, respektive höherer Motorspannung noch was machen?
Viele Grüße
Marc
|
|
|
|
|
|
21.04.2008, 01:52 Uhr
halbkette
|
Hallo Stephan,
"gar nicht übel", deine Mechanik.
Also, eigentlich ist sie sogar als gut zu bezeichnen.
Was die Ablaufzeit betrifft, kann ich mir vorstellen, dass 4 Sekunden für einen kompletten Vor- und Rücklauf etwas lang sind. Da wären höchstens 2 Sekunden nach meinem Vertändnis realistischer. Ich habe mal in Dokumentarfilmen mit Originalaufnahmen darauf geachtet. In ca. 1 Sekunden sollte das Rohr schon wieder vorne sein - 2 Sekunden wären fast schon zu lange.
Wie ich sehe, ist Marc dabei noch kürzer in der Zeitschätzung.
Du schreibst zwar, das sieht bei dir gut aus, aber ich glaube, das liegt am Zeitlupeneffekt.
Wie wäre es, wenn du den Getriebemotor tauscht gegen einen mit der Hälfte der momentanen Untersetzung. - Die Schnecke alleine bringt doch sicherlich schon genug Stellkraft, dagegen ist das Motorgetriebe doch nur noch ein Zeitfaktor.
--
Gruß Hartmut
" Ein Modell ist mehr als nur die Summe seiner Teile "
|
|
| Beitrag 1 mal editiert. Zuletzt editiert von halbkette am 21.04.2008 01:57.
|
|
|
17.05.2008, 20:50 Uhr
Tigerlilli
|
Hallo hier bin ich wieder
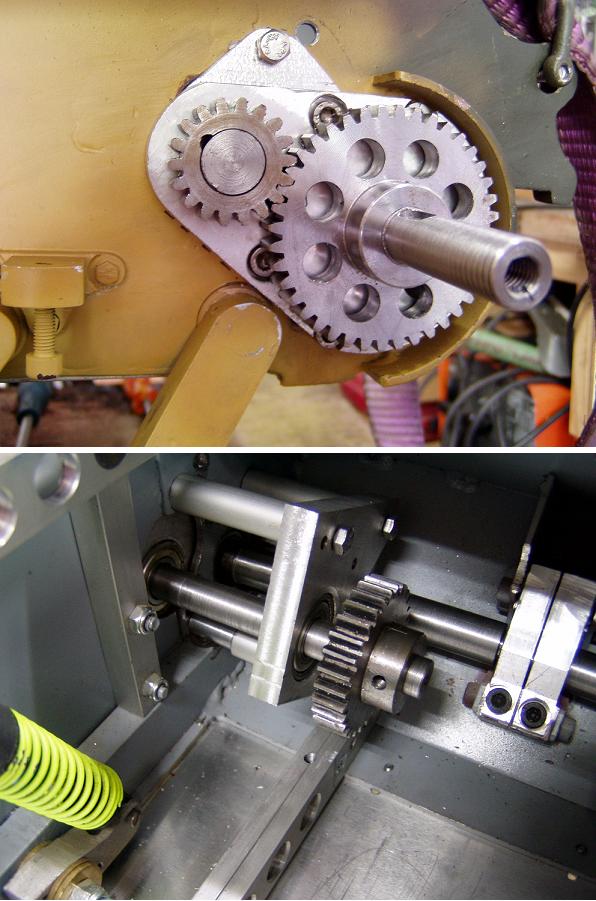
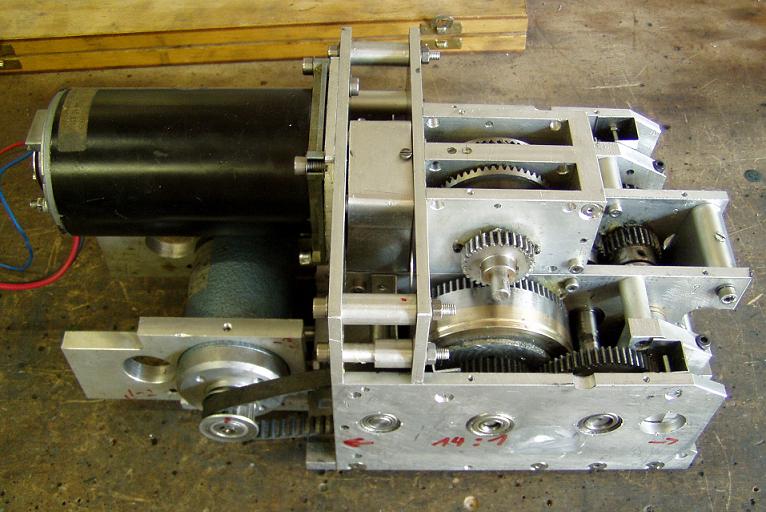
Den Antriebsstrang habe ich jetzt abgeändert.
Das Gertiebe bekam 12mm Wellen die mit 4mm Keilnuten versehen wurden.
Alle Zahnräder bestehen jetzt aus Stahl.
Außen an der Wanne wurde ein Vorgelege mit ü= 2,2:1 angebracht.
Innen noch einmal eine Übersetzung von 1,6:1 .
Hierfür wurden Zahnräder Modul 1,5 verwendet.
Als Antriebsmotor kommt nun ein 24V Engelmotor mit 150W und 6000 umdr. zum Einsatz.
Diesen habe ich bei Ebay für kleines Geld ersteigert.
Den ursprünglich vorgesehennen Motor (2200 umdr.) war zu langsam und dient nun als Lenkmotor.
Die Fahrstrecke in 1 min liegt bei 35m das reicht völlig aus .
Eine Stunde Testfahrt überstand das Getriebe schadlos die Wanne allerdings nicht!
Wie bei der kleinen Tamiya Schwester verabschiedete sich einer der hinterren Kettenabdeckungen.
In die Mechanik für den Rohrrücklauf habe ich auch einen schnelleren Motor eingebaut.
Der Vorlauf ist nun bei ca.1,5 bis 2s beendet . allerdings läuft der Motor extrem lange nach, weshalb der Abschaltnocken sehr früh angefahren werden muß. Bei nachlassender Akkuspannung
( ca.40 Schuss) bleibt er dann aber zu früh stehen wodurch keine erneute Auslösung mehr möglich ist.
Der Auslöseimpuls ist zu kurz.
Da muß ich noch ein bischen tüfteln.
Hier noch einige Bilder
bis dann Stephan
Vorgelege:
|
|
|
|
|
|